Тема 8. Нелінійні розрахунки будівельних конструкцій
3. Кроковий метод.
Відомі декілька варіантів крокової процедури, які відрізняються лише використовуваними методами чисельного рішення задачі Коші. Усі вони випробувані на практиці і мають свою сферу застосування. Так, в ПК ЛІРА є можливість використовувати наступні модифікації крокового методу:
- простий кроковий метод;
- кроковий метод з уточненнями;
- кроково-ітераційний.
У першому випадку на кожному кроці вирішується лінеаризована задача, і в припущенні, що це рішення є досить точним, реалізується перехід до наступного кроку навантаження (рис. 8.3, а). Погрішність розв’язку нелінійної задачі не контролюється – передбачається, що погрішність мала за рахунок вибору малого кроку чисельного інтегрування.
Другий варіант передбачає контроль нев’язок на кожному кроці та ітераційне уточнення навантаження чергового кроку за рахунок врахування нев’язки в рівняннях рівноваги (рис. 8.3, б).
Нарешті, в третьому випадку виробляється ітераційне уточнення рішення на кожному кроці з коригуванням лінеаризованої матриці жорсткості на кожній ітерації (рис. 8.3, в).
Важливою особливістю крокової процедури і її привабливою відмінністю від інших методів рішення нелінійних рівнянь є те, що лінеаризована в околі деякого навантаження система може аналізуватися звичайними методами лінійної будівельної механіки. Мають сенс оцінки коефіцієнта запасу стійкості або частоти і форми власних коливань такої лінеаризованої системи.
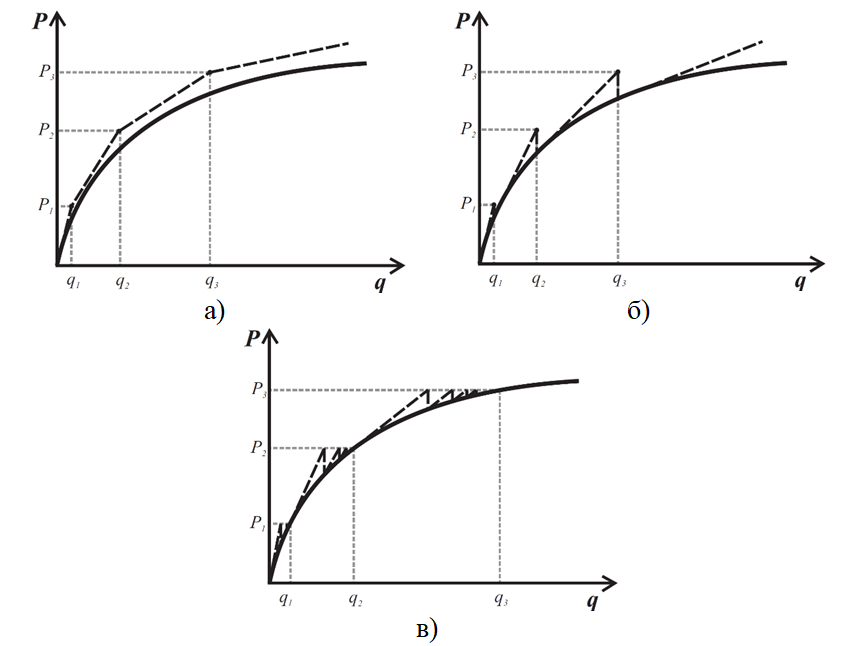
Рисунок 8.3 – Графічна інтерпретація крокових методів розрахунку
Необхідно відмітити, що дослідження поведінки нелінійної системи може вимагати перегляду прийнятої раніше розрахункової схеми, зокрема, збільшення деталізації скінченно-елементної сітки.
Для вирішення фізично і геометрично нелінійних завдань будівельної механіки кроковим методом в ПК ЛІРА призначений кроковий процесор ЛІР- СТЕП. Він організовує кроковий процес і забезпечує рішення лінеаризованої системи дозволяючих рівнянь на кроці для поточного приросту вектора вузлових навантажень, сформованого для конкретного навантаження.
Кроковий процесор дозволяє отримати напружено-деформований стан з урахуванням нелінійних ефектів як для мономатеріальних, так і для біматеріальних (залізобетон) систем. Для біматеріальних систем пропонується певний набір типів армуючих включень.
Матриця жорсткості лінеаризованої фізично нелінійної системи формується на основі змінних інтегральних жорсткостей, що отримуються в точках інтегрування скінченного елементу при вирішенні пружної задачі на конкретному кроці. Схема чисельного інтегрування по області скінченного елементу і набір використовуваних жорсткостей визначаються типом скінченного елементу. Для отримання відповідного набору інтегральних жорсткостей переріз скінченного елементу в точках інтегрування дробиться на ряд елементарних підобластей, в центрах яких визначаються нові значення фізико-механічних характеристик матеріалу, відповідно до заданої користувачем діаграми деформування матеріалу. На кожному кроці вирішується лінеаризоване завдання з формуванням векторів переміщень, зусиль і нових інтегральних жорсткостей із дотичного модуля для наступного кроку. Кількість кроків і коефіцієнти до навантаження задаються користувачем. В цьому випадку основне рівняння МСЕ має вигляд
[K (u)]{u} = {P} (8.1)
де [K (u)] – матриця жорсткості, яка перераховується на кожному кроці з врахуванням поточного значення модуля пружності матеріалу.
ЛІР-СТЕП дозволяє комбінувати лінійні і нелінійні скінченні елементи, а також реалізовувати розрахунок за суперелементною схемою, якщо нелінійні елементи присутні тільки в основній схемі.
Для задання параметрів нелінійності у всіх діалогових вікнах задання характеристик жорсткості для стандартних перерізів додається група кнопок
«Врахування нелінійності», які стають активними після задання відповідного типу скінченних елементів.
Шрифти
Розмір шрифта
Колір тексту
Колір тла
Кернінг шрифтів
Видимість картинок
Інтервал між літерами
Висота рядка
Виділити посилання
Вирівнювання тексту
Ширина абзацу