ЛЕКЦІЯ 7. СИСТЕМИ КООРДИНАТ, ЯКІ ВИКОРИСТОВУЮТЬ У ФОТОГРАММЕТРІЇ
3. Залежність між системами координат точок знімка
При вивченні теорії фотограмметрії й розв’язанні практичних завдань використовують залежності між площинними координатами x, y точок знімка та їхніми просторовими координатами X', Y', Z'. Ці залежності можна встановити, якщо відомі елементи внутрішнього і кутові елементи зовнішнього орієнтування знімка. Координатні осі x, y цієї системи розміщують паралельно відповідним осям на знімку, а вісь z сумісна з головним променем зв'язки So.
Тоді координати x, y будь-якої точки знімка в просторовій системі мають ті ж самі значення, що й у плоскій, а координата z для всіх точок постійна і дорівнює фокусній віддалі знімка (z = f). Системи SX'Y'Z'і S x y z мають спільний початок, тому в процесі перетворення координат з однієї системи в іншу слід виконувати тільки обертання, що виражається, наприклад, формулою(4.2):
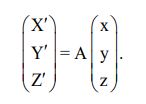
Для цього вводять систему координат S x y z і з початком у точці фотографування S
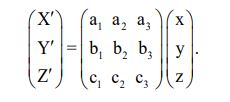
Ортогональна матриця А має третій порядок і називається матрицею перетворення координат. Її елементами є дев’ять направляючих косинуса, тому вище наведене співвідношення можна записати і так :
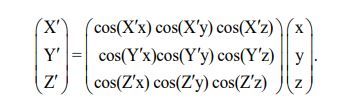
 Причому кожен з напрямлених косинусів - це косинус кута між відповідними осями систем координат, які беруть участь у перетворенні, тобто :
Причому кожен з напрямлених косинусів - це косинус кута між відповідними осями систем координат, які беруть участь у перетворенні, тобто :
Зазначимо, що в формулі (4.4) не добутки координат, укладених в дужках, а позначення осей, між якими береться кут.
Завдяки ортогональності напрямні косинуси матриці пов'язані між собою шістьма незалежними рівняннями :
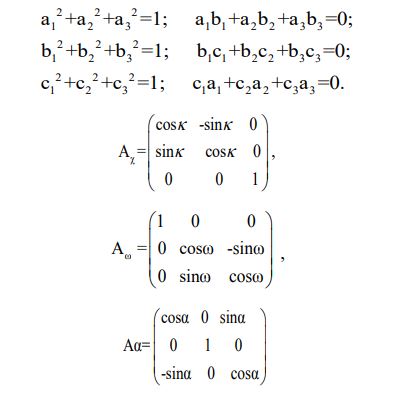
Загальна матриця перетворення A дорівнює добутку:
А = Аα Аω АК
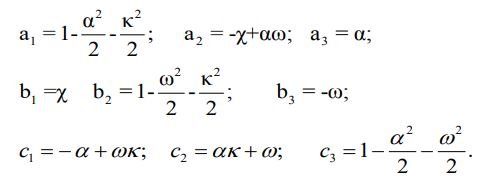
Після перемножування матриць одержують формули для обчислення напрямлених косинусів. При цьому вони матимуть вигляд:
Можна було б навести і ще ряд співвідношень. Перехід від просторових координат до плоских здійснюється за формулами:
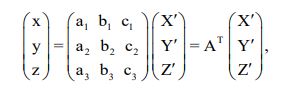
де АТ - транспонована матриця А.
Якщо початок координат знімка не збігається з його головною точкою, то замість координат x та y у формулах 4.7, 4.8 і 4.9 слід використовувати різниці x - xо і y - yо. Формули 4.7 - 4.10 справедливі для будь-яких значень кутових елементів зовнішнього орієнтування знімка:
Для планових знімків, коли α, ω і малі, з точністю до членів другого порядку малості можна записати:
Одержані залежності між системами координат X 'Y' Z 'і xyz використовують в аналітичних способах визначення координат точок місцевості за вимірюваннями знімків.
Шрифти
Розмір шрифта
Колір тексту
Колір тла
Кернінг шрифтів
Видимість картинок
Інтервал між літерами
Висота рядка
Виділити посилання
Вирівнювання тексту
Ширина абзацу