ЛЕКЦІЯ 9. ЕЛЕМЕНТИ ОРІЄНТУВАННЯ ЗНІМКІВ
| Сайт: | Навчально-інформаційний портал НУБіП України |
| Курс: | Фотограмметрія та дистанційне зондування ☑️ |
| Книга: | ЛЕКЦІЯ 9. ЕЛЕМЕНТИ ОРІЄНТУВАННЯ ЗНІМКІВ |
| Надруковано: | Гість-користувач |
| Дата: | вівторок, 24 березня 2026, 05:03 |
Зміст
- 1. Елементи орієнтування знімка
- 2. Визначення елементів зовнішнього орієнтування знімків
- 3. Елементи орієнтування пари аерознімків
- 4. Елементи взаємного орієнтування пари аерознімків
- 5. Визначення елементів взаємного орієнтування за стандартними точками
- 6. Питання для самоконтролю
- 7. Питання на самостійну підготовку
1. Елементи орієнтування знімка
Для побудови за аерознімком моделі місцевості (або плану місцевості) необхідно знати його положення в просторі при АФЗ, тобто його орієнтування в просторі відносно прийнятої системи координат. Величини, які визначають положення аерознімка у просторі відносно прийнятої системи координат, називаються елементами орієнтування знімка. Вони поділяються на елементи внутрішнього орієнтування і елементи зовнішнього орієнтування.
Елементи внутрішнього орієнтування знімка визначають положення головного оптичного променя і як результат усього пучка проектуючих променів відносно центру проектування.
Елементи зовнішнього орієнтування знімка визначають положення вказаного пучка проектувальних променів відносно будь-якої зовнішньої системи координат (геодезичної, фотограмметричної тощо).
Отже, елементи внутрішнього орієнтування знімка – це координати головної точки знімка і фокусна віддаль. Ці елементи визначають у лабораторних умовах із точністю до сотих часток міліметра. Крім елементів внутрішнього орієнтування, при лабораторних дослідженнях АФА визначають віддалі між координатними мітками прикладної рамки. Ці віддалі враховують як еталонні для встановлення деформації негативів. Похибки у визначенні елементів внутрішнього орієнтування призводять до порушення світлової піраміди і в кінцевому підсумку до похибок у встановленні координат місцевості. Елементи внутрішнього орієн-тування завжди вказують у паспорті АФА.
Елементами зовнішнього орієнтування називаються величини, які визначають положення центра проекції та площини знімка в момент фотографування відносно системи координат, прийнятої на місцевості.
Перша система має шість елементів зовнішнього орієнтування: X0,Y0,Z0
– координати центру проекції (передньої вузлової точки об’єктива в момент знімання);
а0 – кут нахилу знімка – кут між віссю Z і головним променем;
t – кут лінії напрямку знімання – кут між віссю Х і слідом площини
головного вертикала;
æ – кут повороту знімка в своїй площині навколо головного променя So –
кута між віссю y і головною вертикаллю vv' знімка.
У другій системі також шість елементів зовнішнього орієнтування, з яких три лінійні й три кутові.
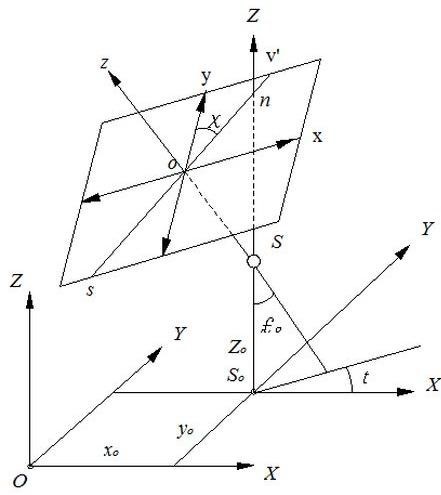
Рис. 1. Елементи зовнішнього орієнтування знімка (перша система)
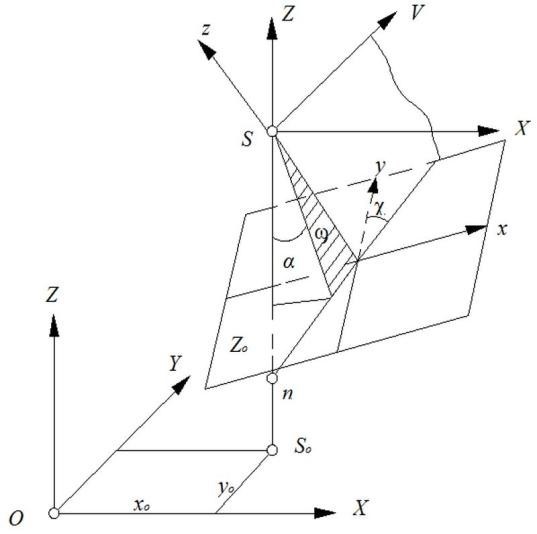
Рис. 2 Елементи зовнішнього орієнтування знімка (друга система)
До лінійних величин належать координати центру проекції S: X0,Y0,Z0, а до кутових – а поздовжній кут нахилу знімка – кут між віссю Z і проекцією головного променя на площину XZ;
w - поперечний кут нахилу знімка – кут між головним променем і його проекцією на площину XZ, який розміщений в площині, що проходить через вісь Y і головний промінь;
æ – кут повороту знімка в своїй площині навколо головного променя – кута між віссю y і слідом площини, яка проходить через вісь Y і головний промінь.
2. Визначення елементів зовнішнього орієнтування знімків
Для вирішення ряду фотограмметричних завдань необхідно знати елементи орієнтування знімка. Його елементи зовнішнього орієнтування можуть бути одержані або за допомогою спеціальних приладів в процесі аерофотознімання, або в камеральних умовах за геодезичними і фотокоординатними опорними точками. Другий варіант називається зворотною просторовою фотограмметричною засічкою. Математичною основою її розв’язання є прямі чи зворотні рівняння колінеарності. Розглянемо один з можливих способів математичного вирішення засічки, що грунтується на застосуванні рівнянь:
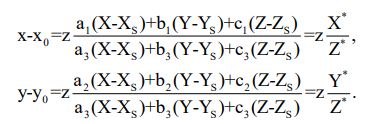
Нехай на знімку зображено точки місцевості, геодезичні координати яких відомі (такі точки називаються опорними), і координати x, y цих точок визначені за даними вимірювань знімка.
Задачу вирішують таким чином:
1.Визначають наближені значення елементів зовнішнього орієнтування знімка. Наприклад, кутові величини приймають рівними нулю, а координати центру проекції визначають за даними бортових вимірювань або яким-небудь іншим способом.
2.Виконують вимірювання з метою визначення координат x та y опорних точок на знімках.
3. Наближені значення елементів зовнішнього орієнтування, а також елементи внутрішнього орієнтування і задані координати опорних точок підставляють в рівняння (4.41) і обчислюють координати x' і y' зображень опорних точок на знімку. Через похибки вимірювань, неточності наближених величин, прийнятих як невідомі, та інші причини обчислені координати не будуть рівні виміряним.
4. Складають рівняння поправок, приймаючи різницю між виміряними і обчисленими координатами точок на знімку в якості їх вільних членів.
Зазначені рівняння матимуть вигляд:
5. При надлишковій кількості знаків систему лінійних рівнянь розв’язують за умови:
![]()
де Р - матриця виміряних координат точок знімка. Тобто складають і
розв'язують рівняння. Для системи (4.55) вони мають вигляд:
![]()
де В - матриця коефіцієнтів a, b, ..., g ' для опорних точок знімка;
δ - вектор поправок;
l - вектор вільних членів рівнянь
6. Уводять поправки δ до наближених значень елементів зовнішнього орієнтування, одержують уточнені значення невідомих. Такий шлях вирішення називають методом ітерацій.
7. Оцінюють точність рішення задачі. Для цього в останньому наближенні обчислюють вагові коефіцієнти Q і поправки V.
3. Елементи орієнтування пари аерознімків
Положення двох суміжних знімків стереопари відносно системи координат місцевості характеризується їхніми елементами зовнішнього орієнтування - величинами, що визначають просторове положення знімків в момент фотографування (рис. 5.4):
XS1 ,YS1 ,ZS1 - координатами лівого центру фотографування;
XS2 ,YS2 ,ZS2 - координатами правого центру фотографування;
α1 ,α2 - поздовжніми кутами нахилу лівого і правого знімків, що лежать в
площинах S1XZ та S2XZ ;
ω1 ,ω2 - поперечними кутами нахилу лівого і правого знімків, що лежать
в площинах S1o1Y та S2o2Y ; χ1 ,χ2 - кутами повороту лівого і правого знімків.
4. Елементи взаємного орієнтування пари аерознімків
При опрацюванні результатів фотограмметричних вимірювань використовують дві системи елементів взаємного орієнтування, відмінних вибором координатної системи і способом орієнтування знімків: нахилами й обертаннями обох знімків при нерухомому базисі або нахилами та обертанням одного знімка і базису фотографування при нерухомому положенні іншого знімка.
Початок базисної координатної системи S1X ́1Y ́1Z ́1 суміщають із центром проекції лівого знімка S1, вісь X ́1 - з базисом фотографування S1S2 , а площину S1X1 Z ́1 - з головною базисною площиною лівого знімка. Елементами взаємного орієнтування в цій системі є:
а'1 - кут у площині S1X'1 Z'1 між віссю S1 Z'1 і головним оптичним променем S0;
χ'1 - кут у площині лівого знімка P1 між віссю o1y1 й слідом перетину
знімка площиною S1o1Y'1;
α'2 - кут у площині S1X'1 Z'1 між віссю S1Z'1(S2Z'2 ) і проекцією правого головного оптичного променя S2o2 на площину S1X'1 Z'1 ;
ω'2 - кут у площині S2Y'2o2 між головним оптичним променем правої зв'язки S2o2 та його проекцією на площину S1X'1 Z'1
χ'2 - кут у площині правого знімка Р2 між віссю o2y2 і слідом перетину
знімка площиною S2 o2Y'.
Кути α'1 і α'2 називають поздовжніми кутами нахилу відповідно лівого та правого знімків відносно базису фотографування, ω'2 - взаємним поперечним кутом нахилу, а кути χ'1 і χ'2 - кутами повороту.
Елементами взаємного орієнтування є:
τ '- кут у площині лівого знімка Р1 між віссю x1 і слідом січення головної
базисної площиною лівого знімка;
ѵ’ - кут нахилу базиса фотографування в площині S1S2o1 між перпендикуляром до базису й віссю S1Z'1;
∆α - взаємний поздовжній кут нахилу, відлічуваний у площині S2X'2Z'2 між віссю S2Z'2 і проекцією головного променя правої зв'язки на площину X'2Z'2 ;
∆ω - взаємний поперечний кут нахилу, відлічуваний у площині S2Y'2o2 між головним оптичним променем правої зв'язки S2o2 та його проекцією на площину X'2Z'2
∆χ - взаємний кут повороту в площині правого знімка Р2 між віссю у2 і слідом площини S2o2Y2 .
Обидві системи відліків елементів взаємного орієнтування точно відповідають системі відліку кутових елементів зовнішнього орієнтування знімків, тому зв'язок внутрішніх і зовнішніх координат точок описується одержаними формулами.
5. Визначення елементів взаємного орієнтування за стандартними точками
Вибираючи точки для визначення елементів взаємного орієнтування, необхідно виходити з вимоги максимального впливу відповідного коефіцієнта рівняння на величину поперечного паралакса точки.
Так, для базисної системи елементів максимальна точність визначення поздовжніх кутів нахилу α'1 і α'2 досягається відповідно при |x1 × y| = max та |x2 × y| = max, поперечного кута нахилу ω'2 - при |y2|=max, а кутів повороту χ'1 та χ'2 - при |х1 | = max і |x2| = max. Ці вимоги повністю задовольняє представлена на (рис. 5.10) стандартна схема розміщення точок, що передбачає вимір на них тільки поперечних паралаксів q і припускає застосування найпростіших прийомів пошуку невідомих.
Для пошуку п'яти елементів взаємного орієнтування проведено шість вимірювань і складено шість рівнянь. Тому повинна існувати одна умова, що зв'язує всі вимірювання. Звернемо увагу, що кут ω визначений двічі й результати, природно, повинні бути однаковими. Це можливо, якщо виконана умова:
![]()
Практично через вплив похибокк вимірювань вказана умова не дотримується, і в правій частині рівняння з'являється нев'язка W. Її допустимі значення ∆w знаходять за правилами теорії похибок вимірювань: диференціюють рівняння за вимірюваними величинами, замінюють диференціали квадратами середніх квадратичних похибок, а коефіцієнти при них зводять у квадрат. Вважаючи похибки виміру паралаксів точок однаковими й прирівнюючи гранично допустиму похибку подвоєній середній квадратичній, одержують:
![]()
При середній квадратичній похибці вимірювання mq=0,02 мм, знаходять, що допустима нев'язка ∆w = 0,15 мм.
6. Питання для самоконтролю
1. Елементи орієнтування знімка
2. Елементи внутрішнього орієнтування знімка
3. Елементи зовнішнього орієнтування знімка
4. В чому полягає строгий спосіб взаємного орієнтування?
7. Питання на самостійну підготовку
1. Основні поняття з стереофотограмметрії
2. Пряма фотограмметрична засічка
3. Побудова фотограмметричної моделі за парою аерознімків
4. Деформація фотогамметричної моделі
5. Елементи зовнішнього орієнтування моделі
Шрифти
Розмір шрифта
Колір тексту
Колір тла
Кернінг шрифтів
Видимість картинок
Інтервал між літерами
Висота рядка
Виділити посилання
Вирівнювання тексту
Ширина абзацу