Лекція 2.1 Вибір ПЛК
| Сайт: | Навчально-інформаційний портал НУБіП України |
| Курс: | Комп'ютерно-інтегровані технології. Ч1 ☑️ |
| Книга: | Лекція 2.1 Вибір ПЛК |
| Надруковано: | Гість-користувач |
| Дата: | понеділок, 2 березня 2026, 13:31 |
1. Що таке ПЛК?
1. Визначення
Програмований контролер - це цифрова обчислювальна операційна електроніка, призначена для використання в промислових умовах. Він використовує програмовану пам'ять для зберігання оперативних вказівок, таких як логічні операції, керування послідовністю, терміни, підрахунки та арифметичні операції, а також контролює різні типи машин за допомогою цифрових та аналогових входів і виходів. процес виробництва. Програмовані логічні контролери та пов'язані з ними периферійні пристрої повинні бути спроектовані таким чином, щоб їх можна було легко інтегрувати з промисловими системами управління та легко розширювати їх функції.
Класифікація 2.PLC
Широкий спектр продуктів ПЛК має різні характеристики та продуктивність. Для PLC класифікація зазвичай базується на різниці в структурі, функціях та кількості входів / виходів.
2.1. Класифікація за структурою
Відповідно до структури ПЛК, його можна розділити на два типи: інтегральний тип і модульний тип.
(1) інтегральний ПЛК
PLC інтегрального типу інтегрує блок живлення, процесор та інтерфейси вводу-виводу в єдиний шасі, як показано на малюнку. З компактною структурою, невеликими розмірами, низькими цінами. Малі PLC зазвичай використовують цю монолітну структуру. Інтегральний ПЛК складається з базової одиниці (також званої хостом) з різними точками вводу-виводу та блоком розширення. Основний блок має процесор, інтерфейс вводу-виводу, порт розширення, підключений до блоку розширення вводу-виводу, та програміст або EPROM. Інтерфейс, до якого підключено маршрутизатор тощо; блок розширення має лише вхід / вихід і блок живлення, а також відсутній процесор. Основні пристрої та блоки розширення, як правило, з'єднуються плоскими кабелями. Інтегральні ПЛК також можуть бути обладнані спеціальними функціональними блоками, такими як аналогові пристрої, блоки управління положеннями тощо, щоб їх функції могли бути розширені.
(2) модульна ПЛК
Модульний PLC робить різні компоненти ПЛК окремими модулями, такими як модулі процесора, модулі вводу / виводу, модулі живлення (деякі включені в модуль процесора) та різні функціональні модулі. Модульний ПЛК складається з рами або базової плити та різних модулів, які встановлені на рамі або базовій платі, як показано. Цей модульний PLC характеризується гнучкою конфігурацією та може бути обладнаний системами різних розмірів відповідно до потреб, а також легко збирати та легко розширювати та підтримувати. Великі та середні PLC зазвичай приймають модульну структуру.
Існують також ПЛК, які поєднують в собі інтегральні та модульні функції для формування так званого укладеного (адтивного) ПЛК. Адитивні ЦПУ ПЛК, блок живлення, інтерфейс вводу / виводу тощо також є окремими модулями, але вони з'єднані кабелями, і кожен модуль може бути укладено по шару за шаром. Таким чином, не тільки система може бути налаштована гнучко, але також може бути компактним.

2.2. Класифікація по функції
Відповідно до різних функцій ПЛК, його можна розділити на нижні, середні, кінцеві три групи.
(1) низькочастотний ПЛК
Низькоколійний ПЛК має такі базові функції, як логічна операція, терміни, підрахунок, переміщення, самодиагностика та моніторинг. Вона також може мати невелику кількість аналогового вводу / виводу, арифметичної операції, передачі даних та порівняння та комунікаційні функції і т. Д. В основному вона використовується для логічного управління та послідовності. Контроль або невелика кількість аналогових керуючих автономних систем керування.
(2) ПЛК середнього класу
На додаток до функцій низькочастотного ПЛК, ПЛК середнього рівня також має багато портів аналогового вводу/виводу, арифметичні операції, передача та порівняння даних, перетворення цифрових систем, віддалені введення / виводу, підпрограми та мережеві зв'язки; деякі також можуть бути додані. Пристрої управління переривань, ПІД-регулювання та інші функції застосовні до складних систем управління.
(3) ПЛК високого класу
На додаток до функцій ПЛК середнього кінця, PLC високого класу також додає арифметичні операції, такі як підписані арифметичні, матричні операції, операції бітової логіки, квадратні кореневі операції та інші спеціальні функції, функції табуляції та функції передачі таблиці. Високоякісний ПЛК має більш yflsqye функцію комунікації, яка може бути використана для великомасштабного управління процесом або являє собою систему розподіленої мережі, що забезпечує автоматизацію заводу.
2.3. Класифікація по точкам вводу / виводу
Відповідно до кількості точок вводу / виводу ПЛК, його можна розділити на дрібні, середні та великі типи.
(1) PLC маленького розміру
Платформи невеликого розміру мають менше 256 точок вводу / виводу, однопроцесорні та 8-бітові або 16-бітні процесори, а кількість пам'яті користувача становить 4KB або менше. Наприклад: серія Mitsubishi FX0S.
(2) ПЛК середнього розміру
Середні PLC мають точки вводу-виводу від 256 до 2048. Вони мають подвійний процесор і мають користувальницьку пам'ять від 2 до 8 Кбайт.
(3) великогабаритний ПЛК
Великі PLCs мають понад 2048 точок вводу-виводу, декілька процесорів, 16-бітових або 32-розрядних процесорів, а кількість пам'яті користувача становить від 8 до 16 Кб.
2. Пристрої сполучення із зовнішнім середовищем

У ПЛК до модулів вводу/виводу за допомогою електричних кабелів підключаються датчики і виконавчі механізми. Залежно від того, чи служить модуль для введення сигналів з датчиків в систему управління або виводить керуючі сигнали на виконавчі пристрої, модулі здійснюють, відповідно, аналого-цифрове або цифро-аналогове перетворення.
Модулі вводу/виводу базового призначення бувають 4 типів: модулі аналогового і дискретного введення / виводу.

Модулі аналогового вводу (AI, analogue input). Вони приймають від датчиків, підключених до його входів, електричні сигнали уніфікованого діапазону, наприклад:

ДТПХхх4 термопары
- 0-20 або 4-20 мА (струмовий сигнал);
- 0-10 В або 0-5 В (потенційний сигнал);
- мілівольтовий сигнал від термопар (TC) або сигнал від термоопорів (RTD) (у разі неуніфікованих сигналу для введення даних необхідний спеціальний модуль - нормалізатор).
Внутрішній устрій (АЦП) перетворює їх у цифровий код.
Нехай в технологічному процесі використовується датчик тиску з діапазоном вимірювань 0-6 бар і струмовим виходом 4-20 мА. Датчик вимірює тиск P, яке в даний момент дорівнює 3 бар. Так як датчик лінійно перетворить значення вимірюваного тиску в струмовий сигнал, то на виході датчика буде:
I вих = 4 + 3/6 * (20-4) = 12 мA;
Вхід модуля AI, налаштований на ті ж діапазони (4-20 мА і 0-6 бар),
приймає сигнал 12 мA і робить зворотне перетворення:
P = 6 * (12-4) / 16 = 3 бар.
Програма, що знаходиться в процесорі ПЛК, здійснює масштабування цієї фізичної величини, або присвоює їй цифровий код.
Відповідність діапазону електричного сигналу між входом модуля і виходом підключеного до нього датчика обов'язково для коректної роботи системи.
Модулі дискретного вводу (DI, discrete input). Приймають від датчиків дискретний електричний сигнал, який може мати тільки два значення: або 0 або 24 В (в окремих випадках 12, 48 В постійного струму, 120 В змінного струму). Вхід модуля DI також може реагувати на замикання / розмикання контакту в підключеному до нього електричного ланцюгу. До DI звичайно підключають датчики контактного типу, кнопки ручного управління, статусні сигнали від систем сигналізації, приводів, що позиціонують пристроїв і тощо.
Нехай в технологічному процесі використовується насос. Коли він не працює, його статусний (вихідний) контакт розімкнений. Відповідний дискретний вхід модуля DI знаходиться в стані "0". Як тільки насос запустили, його статусний контакт замикається, і напруга 24 В йде на клеми входу DI. Модуль, виявивши напругу на дискретному вході, переводить його в стан "1".
Модулі дискретного виводу (DO, discrete output). Залежно від внутрішнього логічного стану виходу ("1" або "0") збуджують на клемах дискретного виходу або знімають з них напругу 24 В. Є варіант, коли модуль залежно від логічного стану виходу просто замикає або розмикає внутрішній контакт (модуль релейного типу ).
Модулі DO можуть управляти приводами, відсічними клапанами, запалювати світлосигнальні лампочки, включати звукову сигналізацію тощо. В якості вихідних пристроїв в цьому модулі застосовується проміжні реле, наприклад, 3SJ5 або РЕК.
Модулі аналогового виводу (АТ, analogue output). Діють як AI, тільки в зворотному напрямку. Для цього в модулі використовуються цифро-аналогові перетворювачі (ЦАП). Нехай в технологічному процесі використовується регулюючий клапан з керуючим входом 4-20 мА. Нехай прийнято рішення використовувати його наполовину (тобто на 50%). Вихід АO, до якого підключений вхід клапана, генерує струм I вих:
I вих = 4 + (20-4) * 0.5 = 12 мA;
Регульований клапан, виявивши на своєму вході струм 12 мА, переходить на 50% відкриття.
Відповідність діапазону електричного сигналу між виходом модуля і входом, підключеного до нього виконавчого механізму, обов'язково. Модуль вводу / виводу також характеризуються канальним числом входів / виходів, а отже, і кількістю сигнальних ланцюгів, які до нього можна підключити. Наприклад, модуль AI 4 - це чоти канальний модуль аналогового введення. До нього можна підключити 4 датчика. DI 16 – шістнадцяти канальний модуль дискретного вводу. До нього можна підключити 16 статусних сигналів з якого-небудь агрегату. У сучасних системах розташування модулів вводу / виводу на DIN- рейці строго не регламентовано, і їх можна встановлювати в довільному порядку. Однак один або кілька слотів, як правило, резервуються під установку модулю інтерфейсу. Одною з жорстких вимог, що пред'являються до сучасних підсистем вводу / виводу, - це можливість "гарячої" заміни модулів без відключення живлення (функція hot swap).
Сучасний ринок засобів автоматизації пропонує широкий спектр апаратних і програмних пристроїв для побудови надійних і зручних в експлуатації систем. Не існує галузі промисловості, в якій не було б потреби застосування контролерів. Одними з їх головних переваг є зниження, аж до повного виключення, впливу, так званого людського фактора на керований процес, скорочення персоналу, мінімізація витрат сировини, поліпшення якості вихідного продукту, і в кінцевому підсумку суттєве підвищення ефективності виробництва. Однією з найважливіших особливостей мікроконтролеру є наявність різного типу стандартних інтерфейсів (RS 485, CAN та ін.), які використовуються для зв'язку з цифровими пристроями. Інтерфейс служить для двох цілей: перша це організація зв'язку пристрою з іншими пристроями (з комп'ютером або інтелектуальним датчиком), а друга - зв'язок мікроконтролеру з іншими мікросхемами на платі. У тих випадках, коли автономний пристрій працює поза будь-якої системи, і не потрібно передачі або прийом даних від іншого
3. Інтерфейсний зв'язок між контролером і підсистемою введення виведення.
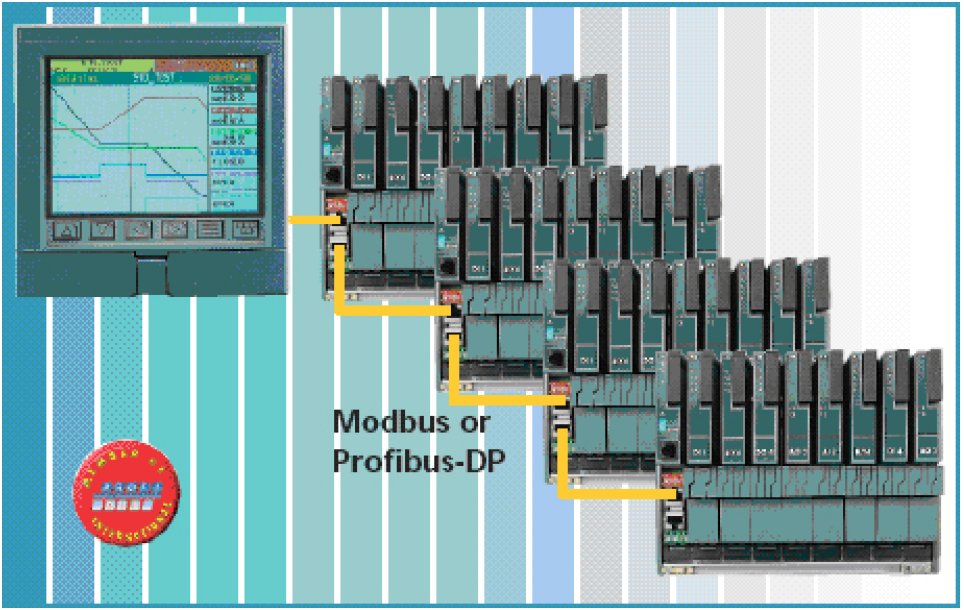
Такий зв'язок можлива завдяки модулю інтерфейсу, що підтримує один з прийнятих комунікаційних протоколів: Profibus DP, Modbus RTU, Modbus +, CAN, DeviceNet, ControNet тощо. Взагалі, налічується більше 50 стандартів промислових шин. На малюнку 2 показана цифрова шина, яка об'єднує один контролер (у вигляді телевізора) і чотири вузли вводу / виводу.
Шина введення / виведення
Програмувати ПЛК, як правило, рекомендується на мовах стандарту IEC-61131.3. Для тих, хто звик до релейно-контактним схемам, рекомендується працювати з мовою, створеним на їх основі (Ladder Diagram), а тим, кому зрозуміліше електронні схеми, можуть скористатися мовою функціональних блокових діаграм (Functional Block Diagram). Досвідчені програмісти можуть використовувати можливості всіх мов.
Сучасний ринок контролерів і програмно-технічних комплексів дуже різноманітний. Вибір найбільш прийнятного варіанту являє собою задачу з багатьма критеріями, рішенням якої є компроміс між вартістю, технічним рівнем, надійністю, комфортністю, витратами на сервісне обслуговування, повнотою програмного забезпечення і багатьом іншим. Тому важливо виділити їх основні характеристики і властивості, на підставі яких можна зробити вибір при побудові систем управління. В якості таких характеристик при виконанні проекту АС пропонується сім узагальнених показників:
- характеристики процесора;
- характеристики периферійної частини ПЛК;
- характеристики каналів введення / виводу, підтримуваних контролерами
- комунікаційні можливості;
- умови експлуатації;
- технічна підтримка;
- програмне забезпечення.
Характеристики процесору - це тип, розрядність основний процесорної плати та робоча частота; підтримка математики з плаваючою комою, що дозволяє виконувати ефективну обробку даних; наявність бітових операцій, число маніпуляцій для обробки даних, можливості системи переривань. Чим менше маніпуляцій для обробки даних, які заподіяні системою переривань, тим більш кращий такий процесор в АСУ ТП.
Характеристики периферійної частини ПЛК - це наявність і обсяг різних видів пам'яті: ОЗП (RAM), ПЗП (ROM), СППЗУ (EPROM), ЕСППЗУ (EEPROM), флеш (Flash), кількість і різноманітність каналів вводу-виводу. Головною відмінною особливістю E (E) PROM (в тому числі і Flash) від ПЗП - незалежної пам'яті є можливість перепрограмування при підключенні до стандартної системної шини мікропроцесорного пристрою. У EEPROM реалізується можливість виробляти стирання окремої комірки за допомогою електричного струму. У флеш-пам'яті використовується дещо відмінний від EEPROM тип комірки-транзистора. Технологічно флеш-пам'ять споріднена як EPROM, так і EEPROM. Основна відмінність флеш-пам'яті від EEPROM полягає в тому, що стирання вмісту осередків виконується або для всієї мікросхеми, або для певного блоку (кластера, кадру або сторінки). Звичайний розмір такого блоку складає 256 або 512 байт, проте в деяких видах флеш-пам'яті обсяг блоку може досягати гігабайтів. Стирати можна як блок, так і вміст всієї мікросхеми відразу. Таким чином, у загальному випадку, для того, щоб змінити один байт, спочатку в буфер зчитується весь блок, де міститься байт, який підлягає зміни, стирається вміст блоку, змінюється значення байта в буфері, після чого проводиться запис зміненого в буфері блоку. Така схема істотно знижує швидкість запису невеликих обсягів даних в довільні області пам'яті, однак, значно збільшує швидкодію при послідовної запису даних великими порціями.
Переваги флеш-пам'яті в порівнянні з EEPROM:
- більш висока швидкість запису при послідовному доступі за рахунок того, що стирання інформації у флеш проводиться блоками;
- собівартість виробництва флеш-пам'яті нижче за рахунок більш простий організації.
Недолік - повільна запис в довільні ділянки пам'яті.
Більшість фірм-виробників поставляють на ринок систем і засобів автоматизації сімейства контролерів, кожне з яких розраховане на певний набір виконуваних функцій і обсяг оброблюваної інформації.
Серед них є сімейства найменших (мікро) контролерів невеликий обчислювальної потужності, здатних підтримувати максимум кілька десятків вводів / виводів, в основному, дискретних. Галузь застосування таких контролерів - збір даних та системи протиаварійного захисту. В якості прикладів таких контролерів можна привести контролери сімейства MicroLogix (Allen-Bradley), Direct Logic DL05 (Koyo), Nano (Schneider Electric).
Сімейства малих контролерів здатні підтримувати сотні вводів / виводів, виконувати більш складні функції. Ці контролери мають достатньо розвинений блок аналогового введення /виводу, виконують операції з плаваючою точкою і функції ПІД-регулювання. До цієї групи контролерів можна віднести SLC 500 (Allen-Bradley), TeleSAFE Micro16 (Control Microsystems), Simatic S7-200, 300 (Siemens).
Контролери середньої потужності, володіючи достатньою пам'яттю і швидкодією, можуть обробляти вже тисячі змінних дискретного, аналогового і швидкісного типу. Застосовуються для автоматизації невеликих об'єктів процесів складів та котелень тощо. Це контролери PLC-5 (Allen-Bradley), Premium (Schneider Electric), Direct Logic DL405 (Koyo) та інші.
Нарешті, деякі великі фірми виробляють клас контролерів дуже високої обчислювальної потужності, що мають пам'ять, вимірювану мегабайтами і гігабайтами. Їх здатність обробляти десятки тисяч змінних і визначила одну з областей застосування - як концентраторів інформації, одержуваної від локальних контролерів. Обчислювальні можливості цього класу контролерів дозволяють реалізовувати складні алгоритми (адаптивне, оптимальне управління), що застосовуються при автоматизації безперервних технологічних процесів. Найбільш яскравими представниками цієї групи контролерів є ControlLogix (Allen-Bradley), Simatic S7-400 (Siemens), Fanuc 90-70 (GE Fanuc), VME (PEP Modular Computers).
4. Характеристики каналів вводу / виводу контролерів.
Параметри контролеру з точки зору підтримуваних ним каналів вводу / виводу є визначальними при його виборі. Важливо не тільки кількість каналів вводу / виводу, що підтримує контролер, але і різноманітність модулів вводу / виводу за кількістю та рівнями комутованих сигналів (струм / напруга), а також способи підключення зовнішніх ланцюгів до модулів вводу / виводу.
Виробники контролерів комплектують свої вироби широкою гамою модулів дискретного і аналогового вводу / виводу. За кількістю можливого підключення каналів розрізняють модулі на 4, 8, 16, 32 і 64 каналу. Така різноманітність модулів полегшує підбір необхідної конфігурації контролера, дозволяючи мінімізувати вартість технічних засобів.
Комутовані модулями дискретного вводу / виводу сигнали можуть мати різний рівень напруги змінного і постійного струму. Це 12, 24, 48 В постійного струму, 120 і 240 В змінного струму з різними навантаженнями по струму.
Рівні комутованих сигналів модулями аналогового вводу / виводу можуть бути найрізноманітнішими. Це 0-5В, 0-10В, +-5В, +-10В по напрузі і 0-5мА, 0-20мА, 4-20мА по струму. Є й спеціальні модулі для введення в контролери сигналів від термопар і термометрів опору різних градуювань. Наведені тут дані за рівнями сигналів, безумовно, не вичерпують усього розмаїття, представленого на ринку. Розрізняються модулі вводу / виводу і за способом підключення зовнішніх ланцюгів. До одних модулів зовнішні кола підключаються за допомогою клем з гвинтовими зажимами. Можливо також підключення зовнішніх ланцюгів через знімні термінальні блоки або фронтальні з'єднувачі, що дозволяє проводити заміну модулів без демонтажу зовнішніх ланцюгів. Деякі виробники ПТК пропонують системи введення / виводу, в яких зовнішні низьковольтні ланцюги підключаються за допомогою пружинних затискачів.
Однією з найважливіших характеристик контролерів є їх здатність підтримувати локальний, розширений, віддалений і розподілений режим вводу / виводу.
Під локальним слід розуміти таке введення / виведення, коли модулі вводу / виводу розміщуються безпосередньо на тому ж шасі, на якому розміщений і модуль центрального процесора (така схема називається іноді крейтовою). Так як кількість слотів в шасі обмежена (максимум 16 - 18 для деяких контролерів), то і кількість локальних вводів / виводів може бути також обмежена. Перевага локальних вводів / виводів полягає в тому, що вони мають високу швидкість оновлення даних. При всіх інших рівних умов, швидкість обробки цих вводів / виводів дуже висока. Ця характеристика особливо важлива, коли мова йде про регулювання технологічних параметрів.
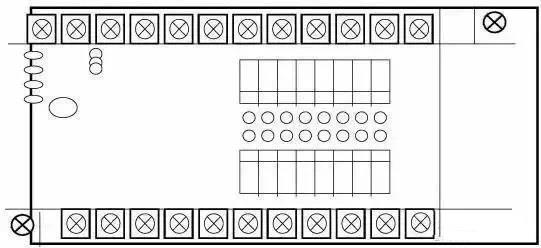
Для підтримки більшого числа каналів вводу / виводу фірми-виробники апаратних засобів забезпечили свої системи можливістю їх розширення за допомогою DIN рейки (рис.3). Модулі вводу / виводу на DIN рейці з'єднуються між собою спеціалізованим коротким кабелем і можуть бути віднесені максимум на кілька десятків метрів від центрального.

Рис.3 Організація розширеного вводу / виводу ПЛК на DIN рейці
Деякі комплекси контролерів здатні підтримувати кілька DIN рейок з великим числом модулів вводу / виводу.
Наприклад, контролери PLC-5 / 40L, PLC-5 / 60L (Allen-Bradley) допускають розширення локального вводу /виводу для прискореного оновлення даних до 16 модулів вводу / виводу.
Віддалене введення / виведення застосовується для систем, в яких є велика кількість датчиків та інших пристроїв, що знаходяться на досить великій відстані (1000 і більше метрів) від центрального процесора. Такий підхід дозволяє зменшити вартість ліній зв'язку за рахунок того, що модулі вводу / виводу розміщуються поблизу пристроїв.
5. Умови експлуатації
Перш за все, слід визначитися який набір функцій повинен виконувати мікроконтролер і за яких умов експлуатації. Особливі обмеження має температурний діапазон. У сільських умовах, як правило, встановлюються вимоги від -30 С до +50 С. Більшість ПЛК не можуть експлуатуватися при цій температурі. Для вирішення завдання їх застосування необхідно використовувати термостатування або інші способи застосування контролерів з обмеженим температурним діапазоном.
Автономні пристрої часто протягом тривалого проміжку часу не мають можливості передачі даних на диспетчерський пункт, тому необхідно місце для оперативного зберігання інформації. Одним з рішень є зберігання даних в ОЗП, отже, чим більше обсяг ОЗП, тим більше даних може в ньому зберігатися. Крім того, для автономних систем, дуже важливий такий параметр як напруга зберігання інформації. Якщо напруга живлення знижується нижче мінімально допустимого рівня, але вище напруги зберігання інформації, то програма не виконується, але дані в ОЗУ зберігаються. Напруга зберігання інформації в мікроконтролерах фірми Motorola, PIC і AVR складає близько 1-1,5В.
Вимоги, що пред'являються до мікроконтролерів віддалених (розподілених) пристроїв, дещо відрізняються від стандартних вимог. Так, якщо в стаціонарних пристроях вимоги до зниженого енергоспоживання мікроконтролерів не є визначальними, то в автономних віддалених пристроях вони виходять на передній план. Найчастіше автономні пристрої це системи, які мають автономне живлення (наприклад, живлення від батарейок або акумуляторів). У цьому випадку, бажано використовувати або мікроконтролер з розширеним, або з зниженому діапазоном живлення. Мікроконтролери з розширеним діапазоном живлення невибагливі до напруги живлення і підходять як для пристроїв з мережевим, так і з автономним живленням. Мікроконтролери зі зниженим діапазоном живлення призначені для виробів з автономним живленням, оскільки їх струм споживання в кілька разів менше струму споживання інших мікросхем. У той же час слід пам'ятати, що мікроконтролери зі зниженим діапазоном харчування зазвичай мають меншу максимальну тактову частоту. Додатковою підставою вибору ПЛК є необхідність задоволення системних вимог проекту.
При виборі ПЛК рекомендується з'ясувати наступні питання:
- Які потрібні периферійні пристрої?
- Які потрібні характеристики вхід-вивідних операцій?
- Чи застосовуються бітові операції або тільки числові?
- Скільки потрібно маніпуляцій для обробки даних?
- Чи повинен ПЛК управлятися по перериваннях, по готовності або за командами людини? Якою кількістю пристроїв (бітів введення / виводу) необхідно управляти?
- Які пристрої з числа багатьох можливих типів I / O пристроїв повинні управлятися: термінали, вимикачі, реле, клавіші, сенсори (температура, світло, напруга і т.д.), візуальні індикатори (LCD дисплеї, LED), аналого-цифрові (A / D), цифроаналогові (D / A) перетворювачі?
- Скільки напруг мережі живлення потрібен для контролера?
- Наскільки відмово стійке джерело напруги?
- Чи буде працювати ПЛК при напрузі мережі живлення технологічного майданчика?
- Чи повинна напруга утримуватися у вузькому фіксованому діапазоні змін, або ж ПЛК може працювати при великій нестабільності?
- Який необхідний робочий струм?
- Чи повинен контролер працювати від мережі або від батарей?
- Якщо від батарей, то чи повинні використовуватися акумуляторні батареї і якщо це так, то яке час роботи без перезарядки, і яке для неї потрібен час?
- Чи існують обмеження за розміром, вагою, естетичним параметрам, таким як форма і / або колір?
- Чи існують якісь специфічні вимоги до умов навколишнього середовища, таким як температура, вологість, атмосфера (вибухонебезпечна, корозійна і т.д.), тиск / висота?
- Де має базуватися користувальницьке програмне забезпечення: на дисках, флеш-пам'яті або ROM? Чи необхідно робота АС в реальному часі, і якщо так, то чи є необхідність придбання ядра програм реального часу або, можливо, буде достатньо звичайної широко використовуваної версії?
- Чи достатньо персоналу і часу для розвитку власного ядра програм?
6. Промисловість 4.0
В продовж останніх декількох років застосування технологій Інтернету речей (IoT), Великих даних і Аналітики для промислової автоматизації все частіше обговорюється в усьому світі. Загальна мета - поліпшити продуктивність виробничої лінії, знизити операційні витрати і скоротити час відгуку на індивідуальні вимоги клієнтів. Відбувається зміна парадигми до централізованого масового виробництва, представленому Генрі Фордом, яке значно знизило ціни на автомобілі і дозволило більшій кількості людей купувати, і тим самим розширювати ринок. Але тепер, коли стають доступними IT-технології, такі як IoT, Великі дані і Аналітика, можлива зміна виробництва недорогих, персоналізованих замовлень.
Початок виробничої епохи, заснованої на IoT, підтримується низкою галузевих груп (таких як Промисловість 4.0, створена в Німеччині), і багато компаній по автоматизації пропонують перші продукти та рішення. Перші додатки, звичайно ж, доповнюють існуючі машини і системи автоматизації. Однак це буде лише невеликим і початковим кроком в порівнянні з тим, що обговорюється в якості остаточної концепції виробництва «лот-1» на основі Інтернету речей. Існуючі і нові постачальники індустрії автоматизації повинні у всіх деталях працювати в напрямку на розуміння нової виробничої парадигми і забезпечити користувачів необхідними апаратно-програмними продуктами.
Приклад реалізаії на ПЛК:
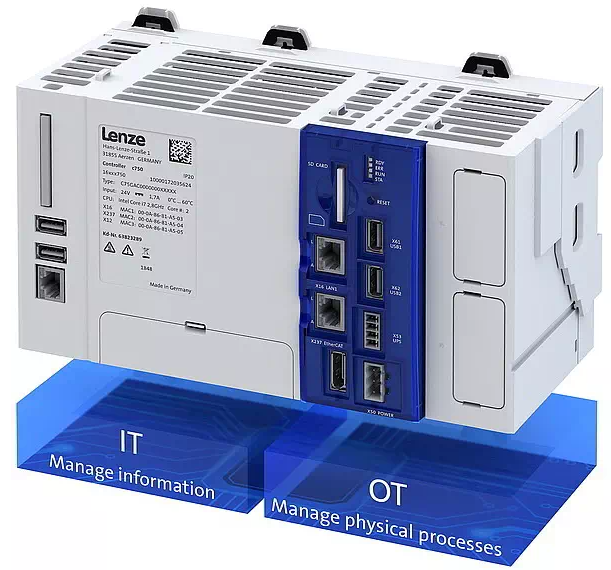
Контролери Lenze с750
Серія контролерів c750 розмиває краї між програмованими логічними контролерами та промисловими ПК. Блок управління c750 об’єднує світи OT (Операційні технології) та ІТ (Інформаційні технології). Відкрита архітектура системи OpenSystem служить для поділу обчислювальної потужності на дві незалежні операційні системи. Linux в режимі реального часу відповідає за завдання управління, тоді як відкритий Windows 10 IoT Enterprise доступний для індивідуальних програмних додатків.
Переваги:
- Програми на базі Windows можна виконувати безпосередньо у Open System та спілкуватися з ПЛК через безпечне з’єднання
- Немає потреби в окремому промисловому ПК
Приклади застосування:
- Оцінка систем зору, зчитувачів штрих-кодів, зчитувачів RFID та 2D / 3D-сканерів
- Додатки для баз даних
- Управління рецептами
- Оцінка даних та попередня обробка даних для передачі у хмарні середовища
Обмін даними з хмарою також стає все більш актуальним. Lenze розробив шлюзи та хмарну платформу X4 для веб-сервісів, щоб машини на розумній фабриці могли бути інтегровані в хмару. Це дозволяє легко та безпечно підключити контролери Lenze с750 до веб-сервісів, щоб стежити за машинними даними та станами з будь-якого веб-пристрою.
7. Література
- Андрюшенко О. А., Водичев В. А. Электронные программируемые реле серий EASY и MFD-Titan — 2-е изд., испр. — Одесса: Одесский национальный политехнический университет, 2006. — 223 с.
- Денисенко В. В. Компьютерное управление технологическим процессом, экспериментом, оборудованием — М.: «Горячая линия-Телеком», 2009 г. — 608 с. — ISBN 978-5-9912-0060-8.
- Галкін П. В., Ключник І. І. Програмування ПЛК в CODESYS: навчальний посібник. — Харків: ФОП Панов А. М., 2019. - 92 с. — ISBN 978-617-7722-62-4
- Пупена О. М., Ельперін І. В., Луцька Н. М., Ладанюк А. П. Промислові мережі та інтеграційні технології в автоматизованих системах. Навчальний посібник. — К.: Ліра-К, 2011. — 500с. — ISBN 978-966-2174-13-7
- Промышленные компьютеры и системы, компоненты для промышленной автоматизации, промышленные корпуса, промышленные материнские и встраиваемые платы (компанія ПРОКСИС)
Шрифти
Розмір шрифта
Колір тексту
Колір тла
Кернінг шрифтів
Видимість картинок
Інтервал між літерами
Висота рядка
Виділити посилання
Вирівнювання тексту
Ширина абзацу