Лекція 2.3 Мережеві технології для ПЛК
| Сайт: | Навчально-інформаційний портал НУБіП України |
| Курс: | Комп'ютерно-інтегровані технології. Ч1 ☑️ |
| Книга: | Лекція 2.3 Мережеві технології для ПЛК |
| Надруковано: | Гість-користувач |
| Дата: | понеділок, 16 березня 2026, 00:36 |
1. Побудова мережі
В даний час з урахуванням потреб користувачів, технологічних можливостей і вимог стандартів в архітектурі систем управління виділяють чотири окремих рівня, об'єднаних промисловими мережами як в межах кожного рівня, так і між рівнями.
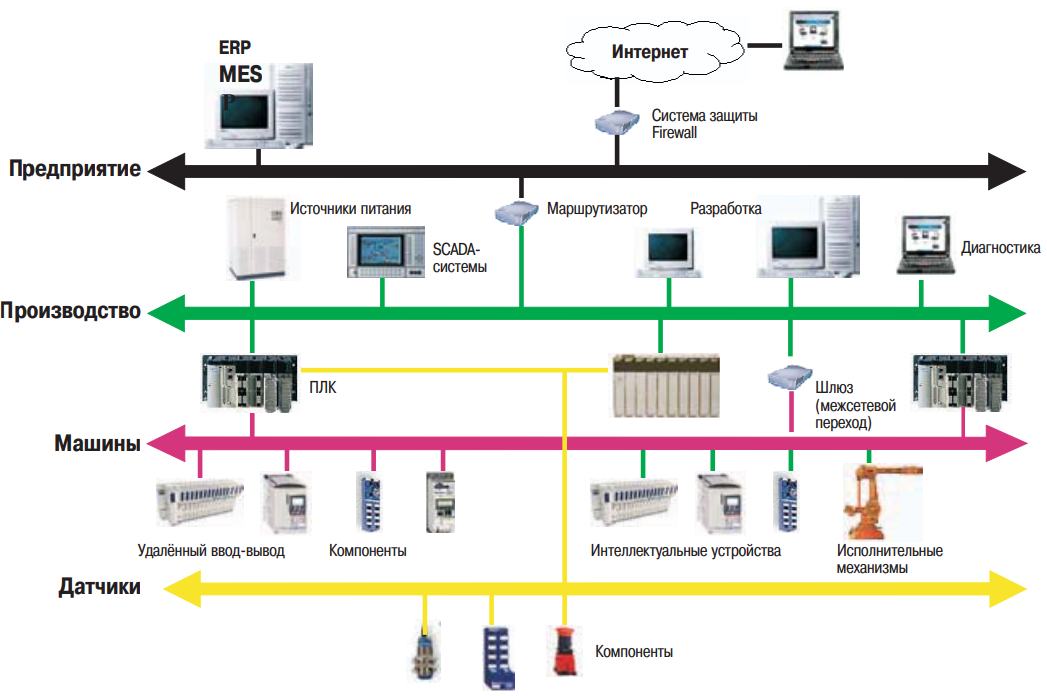
Розглянемо основні топології
2. Основні топології та інтерфейси промислових мереж
Ще в недавньому минулому більшість мереж були простими, зазвичай вони пов'язували один пристрій з іншим або декількома з допомогою послідовного підключення. Швидкість передачі даних була мала, що обмежувало кількість переданої інформації і не дозволяло реалізувати з'єднання в режимі реального часу. З настанням епохи стандартних протоколів зв'язку на програмному та на фізичному рівні комунікація стала істотно краще. Сьогодні є багато різних стандартів, з яких користувач може вибрати потрібний з урахуванням своїх переваг і вимог.
Промислові мережі складаються з програмованих логічних контролерів (ПЛК або PLC), діалогових панелей для роботи людини-оператора (людино-машинний інтерфейс - ЧМІ), комп'ютерів і пристроїв введення / виводу, об'єднаних разом за допомогою електричних і оптоволоконних кабелів, радіозв'язку, а також допоміжних комунікаційних пристроїв, таких як мережеві карти і шлюзи. Фізична топологія мережі - це топологія технічних засобів або мережева архітектура.
Для процесу передачі інформації і обміну між вузлами іноді використовують термін програмної топології.
Зазвичай виділяють наступні види топологій:
- шина;
- зірка;
- кільце;
- мережа.
Топология «шина»
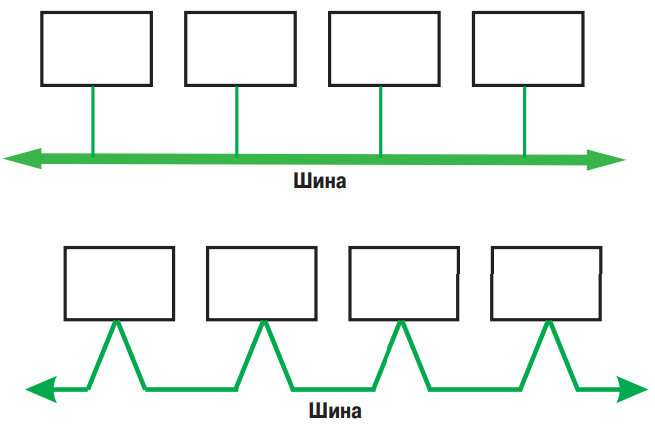
Це найпростіша топологія. Всі елементи з'єднані разом уздовж однієї лінії передачі. Тут слово «шина» відноситься до фізичної лінії. Цю топологію легко можна реалізувати без складного обладнання. Вихід з ладу вузла або елемента не перешкоджає працездатності інших пристроїв. Мережі на рівнях машин і датчиків, також відомі як польові шини, використовують саме цю систему. Топологія «шина» реалізується підключенням до основного кабелю через сполучні коробки або шляхом з'єднання пристроїв ланцюжком.
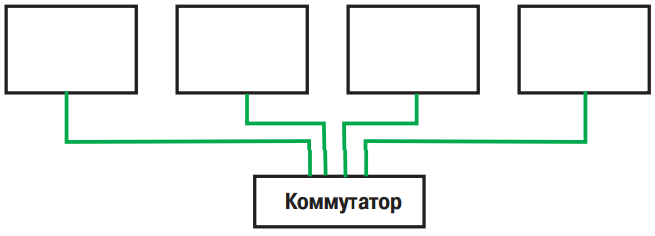
Топологія «зірка»
Це топологія Ethernet, найбільш часто використовувана на рівнях підприємства і виробництва. Її перевага в більшої гнучкості при модернізаціях і при усуненні неполадок. Кінцеві станції об'єднуються через проміжні пристрої (повторювачі, концентратори, комутатори). Вихід з ладу вузла не перешкоджає роботі всієї мережі в цілому, однак проміжні пристрої, що з'єднують вузли, є слабкими ланками, критичними до несправностей.
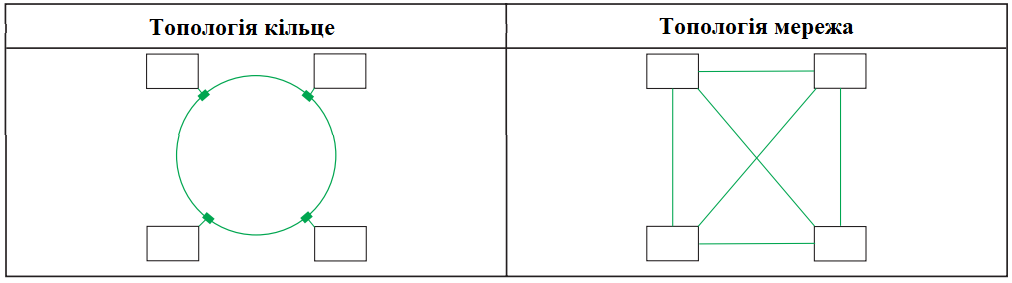
Додаткові топології
- Топологія «кільце» використовує зазвичай ті ж апаратні засоби, що і «зірка», але забезпечує більш високу ступінь готовності системи.
- Топологія «мережу» не отримала широкого поширена в промисловості, її недолік у великій кількості з'єднань
Розглянемо стандартні інтерфейси
2.1. Ethernet.
1) Ethernet.
Ethernet - це найбільш розповсюджена технологія організації локальних мереж.
Сучасні контролери та комп'ютери завжди обладнуються портом Ethernet, і реалізація стандарту має на увазі роботу Plug & Play. З цих причин Ethernet стане єдиним стандартом зв'язку в найближче десятиліття.
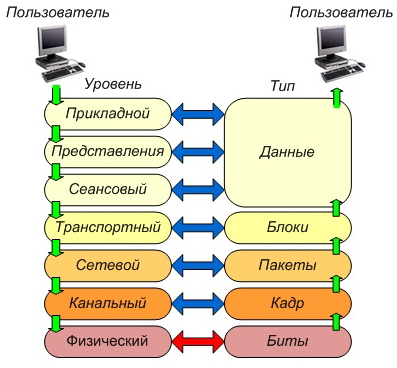
Стандарти Ethernet описують реалізацію двох перших рівнів моделі OSI - дротяні з'єднання і електричні сигнали (фізичний рівень), а так само формати блоків даних і протоколи управління доступом до мережі (канальний рівень). Почнемо з ідеї, що лежить в основі Ethernet. Назва Ethernet походить від двох англійських слів - ether (ефір) і net (мережа). Ethernet використовує концепцію загального ефіру. Кожен ПК передає інформацію в ефір і вказує одержувача. Безумовно, інформація имееть можливість дійти до будь-якого ПК з мережі, але обробляє отриману інформацію тільки ПК-адресат. Решта ПК які не призначені для них дані не обробляють і просто ігнорують.
Інформація в ефір передається не однорідним потоком, а блоками. Блоки ці на канальному рівні прийнято називати кадрами (frame). Усередині кожного кадру - службові і корисні дані. Службові дані - це заголовок, в якому вказані MAC-адресу відправника, MAC-адресу призначення, тип вищого протоколу тощо, а також контрольна сума в кінці фреймів. В середині кадру йдуть корисні дані - власне те, що передаѐтся по Ethernet. Контрольна сума дозволяє перевірити перевірити кадр на цілісність. Контрольну суму вважає адресант і записує в кінець кадру. Адресат заново перераховує суму і потім порівнює її з тією, що записана в кінці фреймів. Якщо обидві суми рівні між собою, то, швидше за все, дані в кадрі при пересиланні не зашкодить. Якщо ж сума не збігається, то можна з упевненістю сказати, що дані пошкоджені.
2.2. USB
Жодне обговорення комп'ютерних інтерфейсів (а програмування ПЛК здійснюється саме з використанням ПК) не буде повним без інтерфейсу USB. Цей інтерфейс замінив послідовні і паралельні схеми з'єднання в ПК і лептопах. USB має високу пропускну здатність (USB 3.0 легко підтримує передачу повнокадровому відео), а його можливості Plug & Play поширюються практично на всі доступні пристрої.
USB може використовуватися в якості внутрішньої шини або бути виведений за допомогою концентратора. Протокол підтримує живлення пристроїв, наприклад зовнішніх жорстких дисків, CD- або DVD-приводів і інших периферійних пристроїв. USB також дозволяє за допомогою перехідників передавати дані по GPIB, RS-232 і Modbus.
USB володіє достатньою пропускною спроможністю і надійністю для промислового контролю в реальному часі, наприклад при з'єднанні контролера на основі ПК з пристроєм вводу / виводу.
2.3. RS232.
У промисловій автоматиці набули найбільшого поширення послідовні інтерфейси, це обумовлено значно меншою вартістю ліній зв'язку за рахунок меншої кількості провідників.
В даний час помітна наступна тенденція засобів автоматизації: Вироби з кремнію дешевшають (мікросхеми), вироби з металів дорожчають. Тому в більшості випадків економічно доцільною є, наприклад установка на судні кількох локальних контролерів або інтелектуальних УСО, об'єднаних в єдину цифрову мережу, замість прокладки великої кількості кабелів до центрального контролера.
Застосовується велика кількість назв для пристроїв, підтримують в тій чи іншій мірі стандарт RS-232: асинхронний адаптер (AUX), COM-порт ПЕОМ, пристрій "Стик-2", інтерфейс "С-2" та ін. Використовується як послідовний інтерфейс (СОМ) у всіх РСсумісних ЕОМ для зв'язку з периферійними пристроями. Чи не застосовується в якості промислового інтерфейсу, але часто служить сполучною ланкою між РС і пристроєм формує інший інтерфейс (наприклад RS-485 або RS-422). RS-232 є асинхронним інтерфейсом передачі даних, приймач і передавач використовують фіксовану швидкість з набору швидкостей: 300, 1200, 2400, 4800, 9600 і 19200 бод (бит в секунду). Стандарт RS-232 визначає: електричні параметри каналу зв'язку, наявність додаткових сигналів квитування, протокол обміну, тип роз'єму і призначення його контактів.
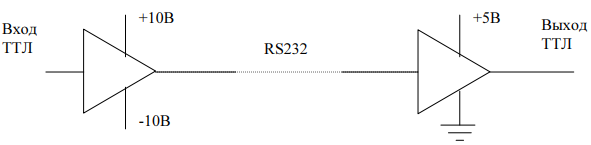
Дозволяє з'єднати тільки два пристрої, одне з яких є провідним, інше веденим, тому все обладнання, що з'єднується з RS-232 протоколу, поділяють на DCE (Data Communication Equipment, обладнання Передачі Даних) і DTE (Data Terminal Equipment, Термінальний Устаткування). Не можна з'єднати два DTE або два DCE. Різниця полягає в роз'ємах і розводці роз'ємів.
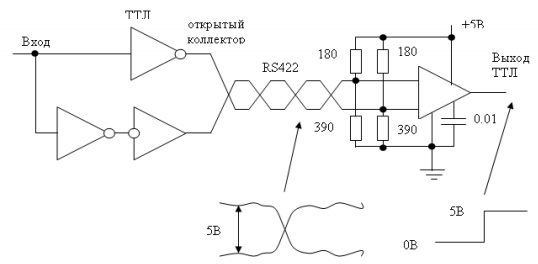
2.4. RS-422
Стандарт встановлює вимоги тільки до електричних параметрів формувачів і приймачів і не визначає інші характеристики системи зв'язку. У цьому стандарті для передачі даних використані диференціальні сигнали, це підвищило стійкість і забезпечило високу швидкість обміну. Парні ТТЛ інвертори посилають в навантажену скручену пару прямий і інверсний сигнали, а диференційний приймач відтворює рівні ТТЛ. Лінія навантажена вхідним опором приймача 120 Ом. Керуючі сигнали квитування відсутні. На відміну від RS-232 дозволяє підключати до 10 приймачів, а в деяких випадках і більше.
2.5. RS-485
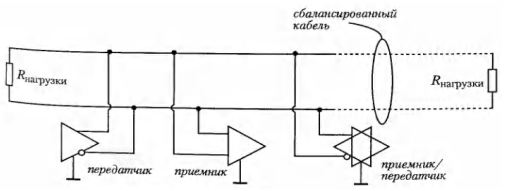
Найбільш широко використовуваний інтерфейс для промислових мереж. Цей варіант є базовим в техніці передачі даних для додатків промисловості, автоматизації будівництва і управління приводами. У ньому використовується двухпроводная кручена пара з екрануванням або без. Подібний RS-422, але використовує тільки одну пару проводів і тому працює в напівдуплексному режимі.
Цей стандарт стосується лише електричним параметрам інтерфейсу і не обумовлює якість сигналу, синхронізацію, протоколи, призначення контактів роз'ємів і інші подібні питання. Максимально допустима швидкість передачі для двійкових даних досягає 10 Мбіт / с. Відповідно до стандарту RS-485 кілька пристроїв з'єднуються збалансованої кручений парою. Пристрої можуть бути прийомними, передають або комбінованими. На обох кінцях кабелю повинні встановлюватися термінатори (кінцеві резистори) з опором не менше 60 Ом
Робота інтерфейсу аналогічна роботі трістабільний логічної шини. Диференціальний поріг для приймачів встановлено на рівні 0.2В при допустимому діапазоні вхідних напруг від -7В до +12 В по відношенню до "землі" приймача. У цій конфігурації жоден з проводів не перебуває під потенціалом "землі". Перекомутація контактів генератора або приймача еквівалентна інверсії значень біт.
Вхідний імпеданс приймача і вихідний імпеданс передавача в пасивному стані вимірюється в одиницях навантаження, які точно визначені в стандарті. Передавач повинен забезпечувати живлення до 32 одиниць навантаження і двох кінцевих резисторів при повній еквівалентної навантаженні лінії 54 Ом. Передавач також повинен витримувати потужність, виділяється при активному стані двох або більшого числа передавачів, частина з яких працює в режимі джерела, а частина - в режимі споживання живлення.
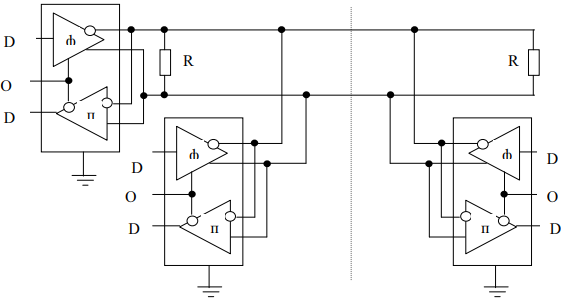
DO- передані дані, DI- прийняті дані, OE- дозвіл передачі, Ф - формувач, П - приймач, R - узгоджувальний резистор.
Стандарт на RS-485 передбачає лише 32 пари передавач / приймач, але виробники розширили можливості RS-485 протоколу, так що тепер він підтримує від 128 до 255 пристроїв на одній лінії, а використовуючи репітери (повторювачі) можна продовжувати RS-485 / RS-422 практично до безкінечності.
Пристрій для формування являє собою диференційний ТТЛ - передавач (схему для RS-422). Приймач являє собою диференційний підсилювач з високим вхідним опором.
За стандартом, формувач розрахований на підключення 32 приймачів і двох узгоджувальних резисторів.
3. Програмне забезпечення - протоколи промислових мереж
У сучасних системах автоматизації, в результаті постійної модернізації виробництва, все частіше зустрічаються завдання побудови розподілених промислових мереж з використанням гнучких протоколів передачі даних.
Пройшли ті часи, коли де-небудь в апаратної ставилося величезну шафу з обладнанням, до нього тягнулися кілометри товстих пучків кабелів, що ведуть до датчиків і виконавчих механізмів. Сьогодні, в переважній більшості випадків, на багато вигідніше встановити кілька локальних контролерів, об'єднаних в єдину мережу, тим самим заощадивши на установці, тестуванні, введенні в експлуатацію та технічне обслуговування в порівнянні з централізованою системою.
Для організації промислових мереж використовується безліч інтерфейсів і протоколів передачі даних, наприклад Modbus, Ethernet, CAN, HART, PROFIBUS та ін. Вони необхідні для передачі даних між датчиками, контролерами і виконавчими механізмами (ВМ); калібрування датчиків; харчування датчиків і ВМ; зв'язку нижнього і верхнього рівнів АСУ ТП. Протоколи розробляються з урахуванням особливостей виробництва і технічних систем, забезпечуючи надійне з'єднання і високу точність передачі даних між різними пристроями. Поряд з надійністю роботи в жорстких умовах все більш важливими вимогами в системах АСУ ТП стають функціональні можливості, гнучкість в побудові, простота інтеграції та обслуговування, відповідність промисловим стандартам.
Найбільш поширеною системою класифікації мережевих протоколів є теоретична модель OSI (базова еталонна модель взаємодії відкритих систем, англ. Open Systems Interconnection Basic Reference Model). Специфікація цієї моделі була остаточно прийнята в 1984 році Міжнародною Організацією по Стандартизації (ISO). Відповідно до моделі OSI протоколи діляться на 7 рівнів, розташованих один над одним, за своїм призначенням - від фізичного (формування і розпізнавання електричних або інших сигналів) до прикладного (API для передачі інформації додатками). Взаємодія між рівнями може здійснюватися, як вертикально, так і горизонтально. У вертикальному - за допомогою інтерфейсів.
У горизонтальному взаємодії програмами потрібен загальний протокол для обміну даними.
3.1. Modbus
Представлений компанією Modicon в кінці 70-х років Modbus (скор. Від Modicon Bus) був розроблений спеціально для промислових контролерів. В ті часи фірмі (тепер це частина Schneider Electric) належала істотна частка ринку ПЛК і промислових контролерів, і було потрібно розробити надійний метод передачі даних між ними.
Modbus стала найуспішнішою шиною в історії, і тому було кілька причин. По-перше, простота і надійність. По-друге, вона поширюється на умовах ліцензії «роялті-фрі» та адмініструється сторонньою організацією (Modbus Organisation). По-третє, цей стандарт простий в обслуговуванні і використанні, і спосіб передачі даних не накладає серйозних обмежень на постачальників устаткування. Зараз Modbus існує в декількох різновидах:
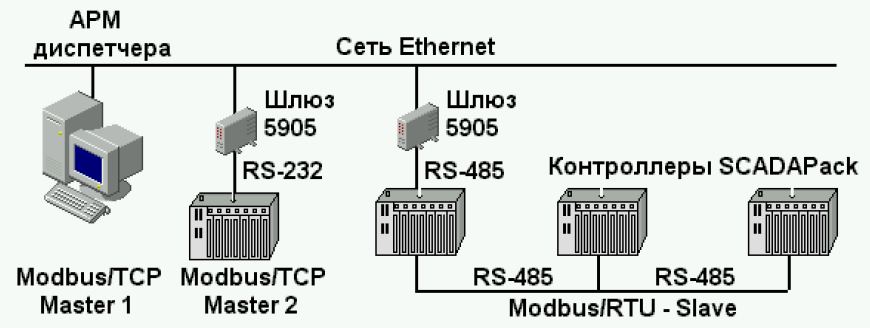
Modbus RTU використовується для з'єднання SCADA-систем і RTU. Modbus TCP / IP використовується для з'єднання через порт 502. Крім того, Modbus використовується в змішаних мережах, а також легко поширюється і на мережі Ethernet.
Існують три основні реалізації протоколу Modbus, дві для передачі даних по послідовним лініях зв'язку, як мідним EIA / TIA-232-E (RS-232), EIA-422, EIA / TIA-485-A (RS-485), так і оптичним та радіо: Modbus RTU і Modbus ASCII, і для передачі даних по мережах Ethernet поверх TCP / IP: Modbus TCP.
Різниця між протоколами Modbus ASCII і Modbus RTU полягає в способі кодування символів. У режимі ASCII дані кодуються за допомогою таблиці ASCII, де кожному символу відповідає два байта даних. У режимі RTU дані передаються у вигляді 8-ми розрядних двійкових символів, що забезпечує більш високу швидкість передачі даних. ASCII допускає затримку до 1 секунди на відміну від RTU, де повідомлення повинні бути безперервними. Також режим ASCII має спрощену систему декодування і управління даними.
Протоколи сімейства Modbus (Modbus ASCII, Modbus RTU і Modbus TCP / IP) використовують один прикладний протокол, що дозволяє забезпечити їх сумісність. Максимальна кількість мережевих вузлів в мережі Modbus - 31. Протяжність ліній зв'язку та швидкість передачі даних залежить від фізичної реалізації інтерфейсу. Елементи мережі Modbus взаємодіють, використовуючи клієнт-серверну модель, засновану на транзакціях, що складаються з запиту і відповіді.
Зазвичай в мережі є тільки один клієнт, так званий, «головний» (англ. Master) пристрій, і кілька «підлеглих» (slaves) пристроїв. Головне пристрій ініціює транзакції (передає запити). Підлеглі пристрої передають запитувані головним пристроєм дані, або виробляють запитувані дії. Головний може адресуватися індивідуально до підлеглого або ініціювати передачу широкомовного повідомлення для всіх підлеглих пристроїв. Підлеглий пристрій формує повідомлення і повертає його у відповідь на запит, адресований саме йому.
Підлеглий пристрій не може самостійно ініціювати передачу інформації або запитувати будь-які відомості у інших пристроїв, робота мережі будується тільки за принципом "запит-відповідь". Цей майстер може так само видати широкомовна (broadcast) запит, адресований всіх пристроїв в мережі, в такому випадку у відповідь сполучення не надсилається.
3.2. PROFIBUS

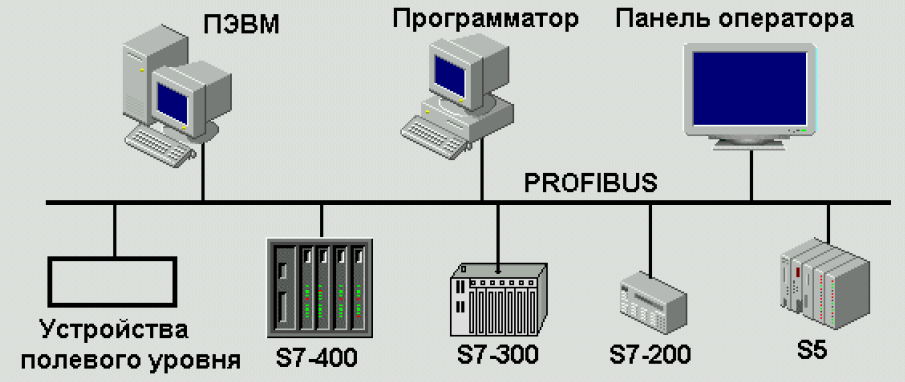
У Європі широкого поширення набула відкрита промислова мережа PROFIBUS (PROcess FIeld BUS). Спочатку, прототип цієї мережі був розроблений компанією Siemens для своїх промислових контролерів.
PROFIBUS об'єднує технологічні і функціональні особливості послідовного зв'язку польового рівня. Вона дозволяє об'єднувати розрізнені пристрої автоматизації в єдину систему на рівні датчиків і приводів. Мережа PROFIBUS ґрунтується на декількох стандартах і протоколах, використовує обмін даними між ведучим і веденими пристроями (протоколи DP і PA) або між декількома провідними пристроями (протоколи FDL і FMS).
Мережe PROFIBUS можна асоціювати з трьома рівнями моделі OSI: фізичний, канальний і рівень додатків.
Єдиним протоколом для доступу до шини для всіх версій PROFIBUS є реалізований на другому рівні моделі OSI протокол PROFIBUS-FDL. Даний протокол дотримується процедур доступу за допомогою маркера (token). Так само, як і мережі на базі протоколів Modbus, мережа PROFIBUS складається з провідних (master) і ведених (slave) пристроїв. Провідний пристрій може керувати шиною. Коли у ведучого (master) пристрою є право доступу до шини, воно може передавати повідомлення без віддаленого запиту. Ведені пристрої - це звичайні периферійні пристрої, не мають прав доступу до шини, тобто вони можуть тільки підтверджувати прийняті повідомлення та надсилати повідомлення ведучому пристрою на його запит. У мінімальній конфігурації мережа може складатися або з двох ведучих, або з одного ведучого і одного відомого пристрою.
Одні і ті ж канали зв'язку мережі PROFIBUS допускають одночасне використання декількох протоколів передачі даних. Розглянемо кожен з них.
PROFIBUS DP (Decentralized Peripheral - Розподілена периферія) - протокол, орієнтований на забезпечення швидкісного обміну даними між провідними DP-пристроями і пристроями розподіленого вводу-виводу. Протокол характеризується мінімальним часом реакції і високою стійкістю до впливу зовнішніх електромагнітних полів. Оптимізовано для високошвидкісних і недорогих систем.
PROFIBUS PA (Process Automation - Автоматизація процесу) - протокол обміну даними з обладнанням польового рівня, розташованим в звичайних або вибухонебезпечних зонах. Протокол дозволяє підключати датчики і приводи на одну лінійну шину або кільцеву шину.
PROFIBUS FMS (Fieldbus Message Specification - Специфікація повідомлень польового рівня) - універсальний протокол для вирішення завдань з обміну даними між інтелектуальними мережевими пристроями (контролерами, комп'ютерами / программаторами, системами людино-машинного інтерфейсу) на польовому рівні. Деякий аналог промислового Ethernet, зазвичай використовується для високошвидкісного зв'язку між контролерами і комп'ютерами верхнього рівня.
Всі протоколи використовують однакові технології передачі даних і загальний метод доступу до шини, тому вони можуть функціонувати на одній шині
3.3. FIP
Протокол FIP (Factory Information Protocol) забезпечує високі швидкості передачі і строго визначені інтервали оновлення даних. Протокол має гібридний централізований або децентралізований контроль за шиною, заснований на принципі широкого мовлення. Використання режиму широкого мовлення позбавляє від необхідності присвоювання кожному пристрою унікального мережевого адресу. Кожен вузол на шині повністю автономний. Всі вузли мають можливість отримувати призначені для них дані. Контроль здійснюється з боку центрального вузла мережі, званого арбітром.
FIP протокол підтримує рівні 1, 2 і 7 моделі OSI. Як середовище передачі використовуються віта пара або оптоволокно. Максимальна довжина мережі - 1000м без повторювачів (до 15 км з оптичними повторювачами) при швидкості обміну 1 Мбіт / с. Мережа підтримує до 128 пристроїв.
Контролери сімейства Premium (Schneider Electric) використовують різновид мережі FIP (FIPIO) для організації віддаленого вводу / виводу. З цієї мережі до центрального процесора (через вбудований порт) можуть бути підключені:
- віддалене введення/виведення з використанням контролерів Momentum;
- панель управління оператора CCX 17;
- персональні комп'ютери та інші пристрої.
Контролери Momentum в мережі FIPIO
4. Мережа DH + (Allen-Bradley)
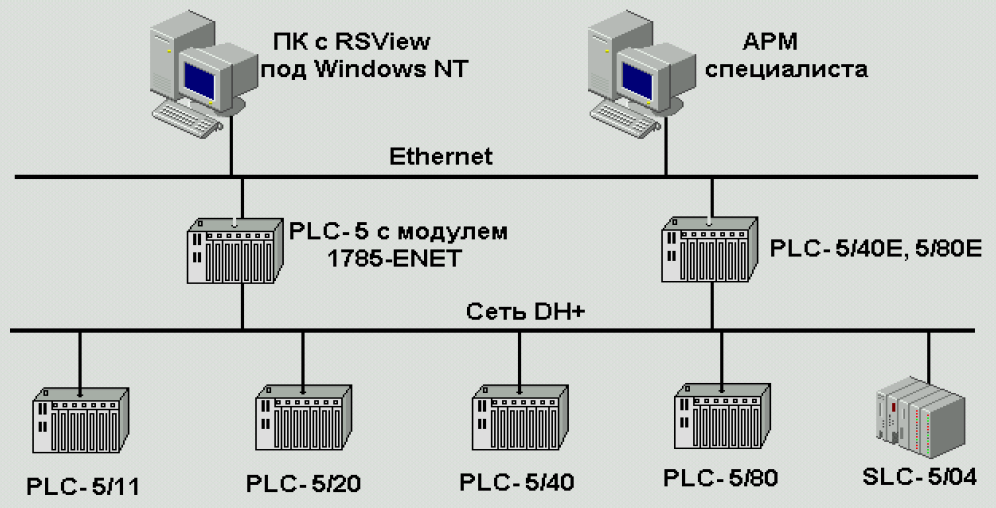
Мережа DH + (Allen-Bradley) підтримує передачу даних і віддалене програмування контролерів на додаток до тимчасової зв'язку між іншими процесорами і пристроями (рис.5). Магістральна лінія мережі DH + може мати протяжність до 3048м, відгалуження - до 30м. До однієї мережі DH + можна підключити до 64 пристроїв. Швидкість передачі даних залежить від довжини шини і може налаштовуватися від 57.6 Кбод (3048м) до 230.4 Кбод (750м).
Характеристика одноранговой мережі зв'язку:
- відсутність "майстра";
- мінімальний мережевий трафік;
- будь контролер ініціює зв'язок з будь-яким мережним вузлом;
- простота нарощування контролерів в мережі.
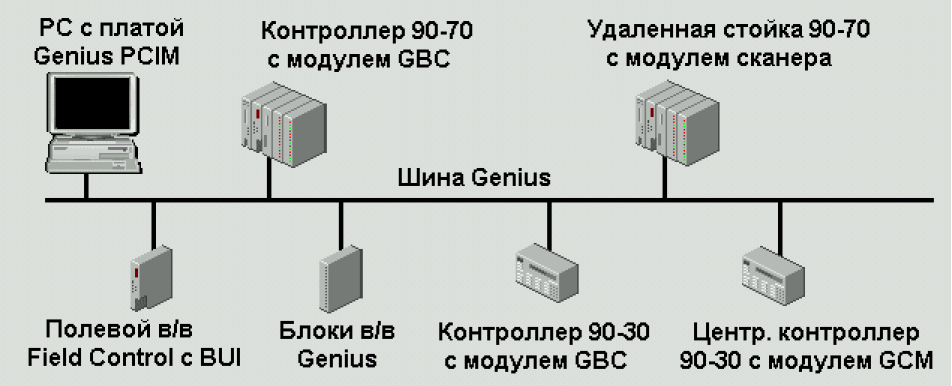
5. Мережа Genius
Мережа Genius фірми GE Fanuc призначена для об'єднання в закінчену систему контролерів GE Fanuc серій 90-70 і 90-30, віддаленій периферії Genius і Field Control (рис. 6). Взаємодія різних пристроїв з мережею Genius здійснюється за допомогою контролерів шини Genius (GBC), інтерфейсних модулів (GCM), блоків інтерфейсу з шиною Genius (BUI). Фізично пристрої об'єднуються в мережу з допомогою екранованої вітої пари. Мережа має топологію "шина", до якої може бути підключено до 32 пристроїв. Максимальна довжина шини становить 2,3 км при швидкості обміну 38,4 Кбод. Максимальна швидкість передачі даних 153,6 Кбод досягається при довжині лінії до 600 м.
Мережа Genius підтримує передачу як глобальних даних (Global Data) так і дейтаграм (при кожному акті сканування). Для обміну даними по Global Data кожному контролеру, що входить до складу мережі виділяється ділянка адресного простору. У цю ділянку він передає дані вказані при конфігуруванні його контролера шини. Передача даних здійснюється без вказівки контролера, який повинен їх отримати. Ця ділянка доступна всім підключеним до шини PLC тільки для читання. Таким чином, для всієї мережі створюється єдиний набір даних, використовуваний для обміну. Один контролер шини забезпечує прийом/передачу до 128 байт даних від кожного з вузлів.
Контролери фірми GE Fanuc в мережі Genius
Дейтаграмма (Datagram) являє собою спрямовану посилку даних від одного контролера до іншого. Прийом/передача дейтаграм відбувається під управлінням програми користувача. Момент відправлення дейтаграми може бути заданий з необхідною періодичністю або по настанню якої-небудь події.
6. Література та додаткові матеріали
Дискретные входы/выходы, установка связи с ПЛК (відео)
А.А. Мячев, В.Н. Степанов, В.К. Щербо; Под ред. А.А. Мячева Интерфейсы систем обработки данных: Справочник М.: Радио и связь, 1989. - 416 с.: ил.
Кангин В. В. Аппаратные и программные средства систем управления. Промышленные сети и контроллеры: учебное пособие / В. В. Кангин, В. Н. Козлов. — М. : БИНОМ.Лаборатория знаний, 2010. — 418 с. : ил. — (Автоматика). ISBN 978-5-94774-908-3
Протокол ОВЕН для «чайников» // http://ftp.owen.ru [Электронный ресурс]-
Шрифти
Розмір шрифта
Колір тексту
Колір тла
Кернінг шрифтів
Видимість картинок
Інтервал між літерами
Висота рядка
Виділити посилання
Вирівнювання тексту
Ширина абзацу