Тема 5. Принципи побудови скінченно-елементних моделей. Характеристики жорсткості елементів розрахункової схеми.
| Сайт: | Навчально-інформаційний портал НУБіП України |
| Курс: | Основи автоматизованого проектування в будівництві ☑️ |
| Книга: | Тема 5. Принципи побудови скінченно-елементних моделей. Характеристики жорсткості елементів розрахункової схеми. |
| Надруковано: | Гість-користувач |
| Дата: | вівторок, 5 травня 2026, 12:24 |
1. Системи координат
Сучасні програмні комплекси надають користувачеві можливість використання набору різних систем координат. Можна виділити три основні види систем координат (рис. 6.1):
- Глобальна (X, Y, Z) – відносно якої може описуватися весь набір чинників, що характеризують комп’ютерну модель: вузлові переміщення, в’язі місцеві і вузлові навантаження, напруження і т. д. Глобальна система координат може бути декартовою, циліндричною, сферичною і ін.
- Місцева система координат (X1, Y1, Z1) є прерогативою скінченних елементів. Відносно неї може задаватися навантаження, що діє по області скінченного елементу, обчислюється напруження, ведеться розрахунок армування.
- Локальна система координат (X2, Y2, Z2) є прерогативою вузлів. Відносно неї можуть задаватися напрями переміщень, вузлові навантаження, в’язі.
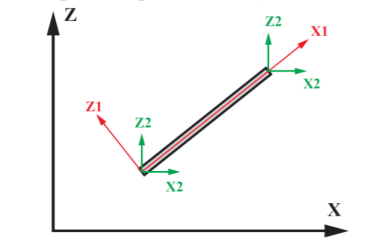
Рисунок 6.1 – Системи координат стержневого СЕ
2. Ознаки схеми.
Кожний вузол схеми в загальному випадку має 6 ступенів вільності: три лінійні переміщення вздовж осей X; Y; Z і три повороти навколо X; Y; Z. Для розрахункових схем, у яких кількість ступенів вільності у вузлі менша шести (плоскі ферми, плоскі рами і т.п.), для зменшення розмірності задачі застосовується так звана ознака схеми. В ПК ЛІРА-САПР задіяні п’ять ознак схеми:
Ознака 1 – схеми, що розташовуються в площині XOZ; кожний вузол має 2 ступені вільності – лінійні переміщення уздовж осей X, Z. За цією ознакою розраховуються плоскі ферми і балки-стінки.
Ознака 2 – схеми, що розташовуються в площині XOZ; кожний вузол має 3 ступені вільності – лінійні переміщення уздовж осей X, Z і поворот навколо осі Y. За цією ознакою розраховуються плоскі рами і допускається включення елементів ферм і балок-стінок.
Ознака 3 – схеми, що розташовуються в площині XOY; кожний вузол має З ступені вільності – лінійне переміщення вздовж осі Z і навколо осей X, Y. За цією ознакою розраховуються балочні ростверки і плити; допускається врахування пружної основи.
Ознака 4 – просторові схеми, кожний вузол яких має 3 ступені вільності – лінійні переміщення уздовж осей X, Y, Z. За цією ознакою розраховуються просторові ферми та об’ємні тіла.
Ознака 5 – просторові схеми загального виду з шістьма ступенями вільності у вузлі. За цією ознакою розраховуються просторові каркаси, оболонки і допускається включення об’ємних тіл, врахування пружної основи і т.п.
3. Врахування прямої та косої симетрії.
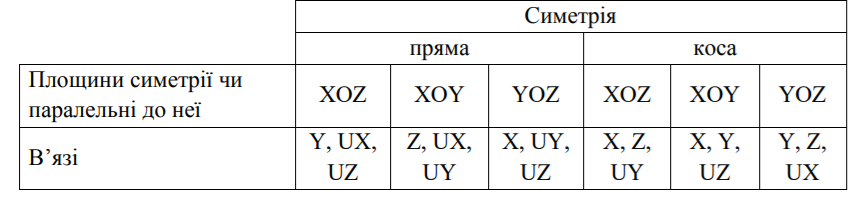
Якщо розрахункова схема має площини симетрії, то для зменшення розмірності задачі рекомендується вводити у розрахунок частину схеми, що обмежена цими площинами.
На вузли, що лежать у площині прямої симетрії, накладаються в’язі, ортогональні до цієї площини, а при косій симетрії – паралельні до неї. У табл. 6.1 показано, за якими напрямками ступенів вільності на ці вузли накладаються в’язі.
Якщо площина симетрії не паралельна до жодної з площин загальної системи координат, то накладання відповідних в’язей можна виконати за допомогою локальної системи координат вузла.
Таблиця 6.1 – Накладання в’язей при врахуванні симетрії.
4. Моделювання шарнірів у стержневих і площинних елементах.
Під словом «шарнір» мається на увазі звільнення від лінійної або кутової в’язі між вузлом схеми і кінцем стержня, що входить у цей вузол, чи вузлом скінченного елемента
У стержнях шарніри задаються безпосередньо при створенні схеми і орієнтуються відносно осей місцевої системи координат Х1, Y1, Z1. Шарнірне кріплення стрижня до вузлів може бути реалізоване також за допомогою нульової згинної жорсткості.
При заданні шарнірів у площинних елементах рекомендується використовувати такий прийом: у місці, задання шарніра здійснити подвійну нумерацію вузлів розбиття (один із вузлів відноситься, до одного, а інший – до іншого скінченного елемента). Потім об’єднати відновідні лінійні переміщення цих вузлів. Якщо в іншому напрямку шарнір відсутній, то об’єднуються також і кутові переміщення цих вузлів у цьому напрямку.
Якщо необхідно, наприклад, у плиті (рис. 6.2) описати шарнір відносно осі Y, то по лінії вузлів 4, 12, 20, 28, 36 робиться подвійна нумерація вузлів (додаються вузли. 5, 13, 21, 29, 37, координати яких можуть співпадати з координатами вузлів 4, 12, 20, 28, 36). Потім попарно об’єднуються (для вузлів 4 і 5, 12 і 13 і т.д.) переміщення у напрямках Z і UX. Для елементів оболонок, крім цього, попарно об’єднуються лінійні переміщення вузлів у напрямках X і Y.
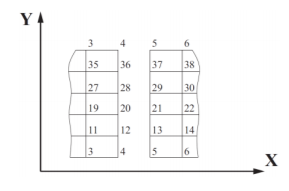 Рисунок 6.2 - Моделювання шарніру у плиті.
Рисунок 6.2 - Моделювання шарніру у плиті.
Так само чинять при шарнірному кріпленні елементів оболонки до стержня. Окремо нумеруються вузли оболонки і стержня (та ж подвійна нумерація), а потім попарно об’єднуються переміщення вузлів у напрямках X,Y і Z.
Якщо відомі лінійні податливості в місці установки шарніра, то між вузлами подвійної нумерації задається пружна в’язь (СЕ типу 55). У цьому випадку об’єднання переміщень по вказаних напрямках не задається.
5. Задання жорсткості елементам розрахункової схеми.
Для кожного типу скінченного елемента розрахункової схеми задається певний набір характеристик жорсткості, необхідних для проведення розрахунку його напружено-деформованого стану (НДС).
Для стержневих елементів характеристики жорсткості можуть бути задані одним із наступних способів:
1) розміри для перерізів стандартної форми (прямокутник, круг тощо);
2) чисельні характеристики жорсткості:
EF – поздовжня жорсткість;
EІy – згинна жорсткість відносно осі Y1;
EIz – те саме, відносно осі Zl;
GІk – жорсткість на кручення;
GFy – зсувна жорсткість відносно осі Y1 (уздовж осі Zl);
GFz – те саме, відносно осі Z1 (уздовж осі Y1).
3) характеристики сталевих профілів та їхні комбінації з бази типових перерізів сталевого прокату;
4) характеристики перерізів нестандартної форми, що обчислюються за допомогою системи КС-САПР.
Крім того, додатково можуть бути задані такі характеристики:
- жорсткі вставки уздовж осей місцевої системи координат;
- ядрові відстані перерізів – по два числа для кожної з осей інерції при заданні чисельних характеристик;
- величина кута чистого обертання;
- параметри пружної основи А, С1, С2, де А – ширина чи висота перерізу, С1 i C2 – коефіцієнти постелі по моделі Пастернака;
- ознака врахування зсуву при складанні матриці жорсткості.
Для перерізів, що задані за допомогою стандартних перерізів і бази перерізів сталевого прокату, характеристики жорсткості обчислюються автоматично. Якщо характеристики жорсткості перерізів стержнів задані чисельно і при цьому необхідно виконати обчислення розрахункових сполучень зусиль (РСЗ), то обов’язково мають бути задані розміри ядрових відстаней.
Для плоских скінченних елементів задаються: Е – модуль пружності, v – коефіцієнт Пуассона і δ – товщина елемента.
Для просторових скінченних елементів задаються Е – модуль пружності та v – коефіцієнт Пуассона.
6. Конструювання перерізів за допомогою системи КС-САПР.
Система КС-САПР надає можливість компонувати в графічному середовищі переріз складної форми. Складний переріз може включати стандартні перерізи, перерізи прокатних профілів і перерізи довільного контуру. Переріз довільної форми задається зовнішнім контуром і набором внутрішніх контурів (отворів). Контури є замкнутими ламаними, які описуються вузлами (вершинами) або задаються графічно на масштабній сітці вузлів. Задана точність сітки визначає точність заданих контурів.
Після виконання процедури автоматичної тріангуляції області створеного перерізу здійснюється обчислення методом чисельного інтегрування таких характеристик:
F – площа перерізу;
Yс, Zc – координати центру ваги;
Іy, Iz – головні центральні моменти інерції, Іу > Iz;
φ – кут повороту головних осей інерції;
EF, EIy, ЕІz – поздовжня та згинні жорсткості;
Y+, Y-, Z+, Z- – ядрові відстані.
Обчислення характеристик перерізу при врахуванні кручення та зсуву представляє собою досить складну математичну задачу і виконується на основі теорії Сен-Венана. При цьому визначаються три визначені в області перерізу Ω функції напружень ψ1, ψ2, ψ3, перша з яких відповідає крученню, друга і третя – зсуву. Дані функції знаходяться методом скінченних елементів як розв’язки ряду диференціальних рівнянь теорії Сен-Венана. За знайденими функціями напружень шляхом інтегрування обчислюють:
Ik – момент інерції кручення;
Fy, Fz – площі зсуву;
GІk, GFy, GFz – жорсткість на кручення та зсувні жорсткості;
Ic0 – секторіальний момент інерції;
Y0, Z0 – координати центру кручення;
Y0, Z0 – координати центру згину (зсуву).
Всі характеристики жорсткості обчислюються відносно головних центральних осей інерції.
Також КС-САПР дозволяє за заданими користувачем чи імпортованими після розрахунку зусиллями провести обчислення компонентів напруженого стану у всіх вузлах перерізу:
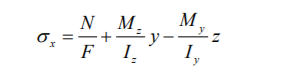 (6.1)
(6.1)
 (6.2)
(6.2)
 (6.3)
(6.3)
де у, z – координати точки перерізу.
Головні напруження обчислюються за формулою:
 (6.4)
(6.4)
За необхідності можуть бути обчислені еквівалентні напруження за різними теоріями міцності. Компоненти напруженого стану можуть бути виведені у табличному чи графічному (у виді ізополів) вигляді.
КС-САПР може працювати як у автономному режимі, так і в інформаційному зв’язку з ПК ЛІРА. При роботі в автономному режимі визначення характеристик жорсткості може розглядатися як самостійна задача, а зусилля, що діють на переріз, задаються користувачем.
7. База даних перерізів прокатного сортаменту.
ПК ЛІРА-САПР поставляється з набором баз даних прокатного сортаменту, що відповідає нормативним документам України, США, Європи та країн СНД. В базах даних міститься детальна інформація про:
- тип перерізу (двотавр, швелер, кутник тощо);
- маркування;
- геометричні розміри перерізу;
- характеристики жорсткості, які будуть використані при розрахунку;
- список матеріалів, з яких виготовляється даний сортамент, та їх механічні властивості.
База даних прокатного сортаменту в ПК ЛІРА-САПР є відкритою, тобто користувач за потреби може переглянути, відредагувати та доповнити її вміст. Для цього призначена програма РС-САПР, яка надає можливість в графічному середовищі переглядати та змінювати будь-які характеристики сортаменту. За замовчуванням сортамент відсортований у базі даних за зростанням площі, користувач за потреби може змінити індексацію.
Шрифти
Розмір шрифта
Колір тексту
Колір тла
Кернінг шрифтів
Видимість картинок
Інтервал між літерами
Висота рядка
Виділити посилання
Вирівнювання тексту
Ширина абзацу