Тема 5. Розробка ґрунту механічним способом
2. Розробка ґрунту одноковшовими екскаваторами
Близько 45% земляних робіт виконують одноковшові екскаватори, які мають комплект змінного робочого обладнання: пряму, зворотну лопату, драглайн, грейдер. Крім цього стрілу також можна обладнати вантажним гаком або клин-бабою. За допомогою одноковшевих екскаваторів риють котловани, траншеї, влаштовують насипи, виїмки. Прямою лопатою розробляють грунт, коли екскаватор розташований нижче рівня вибою, який розробляють. Зворотну лопату використовують для розроблення ґрунту, розміщеного нижче за рівень стояння екскаватора, із завантаженням ґрунту в транспортні засоби або у відвал. Грейдер, як і драглайн, застосовують для розробки ґрунтів малої щільності, а також таких, що знаходяться під водою.
Місце, в якому екскаватор розробляє грунт, називають забоєм. Форма і розміри забою залежать від параметрів екскаватора, його обладнання (виду ковша), властивостей ґрунту, розмірів виїмки. Екскаватор, обладнаний прямою лопатою, розробляє грунт способами лобового й бокового забоїв. У лобовій проходці екскаватор розробляє грунт перед собою і розвантажує його в транспорт, при бічній він здійснює виїмку по одну сторону щодо осі переміщення, а вивантаження виконує у транспорт, розташований по інший бік осі проходки. Лобові проходки бувають вузькими (ширина проходки 0,8-1,5 розміру найбільшого радіуса різання Rmax), нормальними (завширшки1,5-1,8 Rmax), розширеними (завширшки більше ніж 2 Rmax) (рис. 2.3).
Екскаватори зі зворотною лопатою розробляють грунт під час улаштування траншей і котлованів. При використанні зворотної лопати також застосовують лобовий і бічний забій. Лобові проходки використовують переважно для розроблення невеликих котлованів і траншей. Розміщення екскаватора під забоєм дає змогу розробляти грунт у виїмках з високим рівнем ґрунтових вод без допоміжних заходів до його зниження. Основні технологічні параметри екскаватора такі: найменший радіус копання на рівні стоянки R1, найбільший радіус копання R2 на максимальній глибині Hmax, радіус розвантаження R0. (рис.2.4).

Рис. 2.3 – Схеми роботи екскаватора з прямою лопатою забоями: а – г – лобовими (а – при вузькому забої; б – при забої паралельної ширини; в – при розширеному забої до 2,5R; г – при розширеному забої до 3,5R); д – бічним; 1 – автосамоскид; 2 – вісь забою; 3 – центр ваги забою; 4 – екскаватор; 5 – вісь переміщення екскаватора; 6 – вісь руху автосамоскида; 7 – місця стоянок екскаватора; Rp – радіус різання; Rmax – максимальний радіус різання; Rст – радіус на рівні стоянки екскаватора
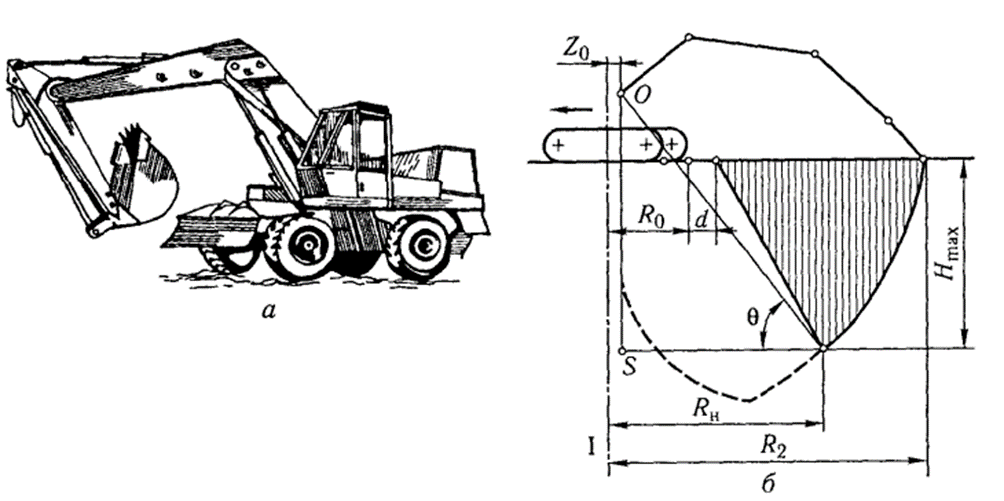
Рис. 2.4 – Екскаватор зі зворотною лопатою: а – загальний вигляд; б – основні технологічні параметри: d – крок переміщення екскаватора; R0 – радіус габаритного встановлення екскаватора; R1 – найменший радіус копання на рівні стоянки; R2 – найбільший радіус копання на рівні стоянки; Rн – радіус копання на заданій глибині; Нmax – найбільша глибина копання; Z0 – відстань від п’яти стріли до осі обертання екскаватора
Екскаватори, обладнані драглайном, мають стрілу великих розмірів і ківш на гнучкій підвісці. Застосовують для розроблення кар’єрів, виїмок значних 20 розмірів вивантаженням ґрунту у відвал або транспортні засоби. Глибина копання може досягати 20 м, найбільший радіус копання на рівні стоянки – 20м. Екскаватори, обладнані грейдерами, застосовують для розроблення котлованів під окремо розміщені споруди, колодязі, окремих фундаментів, опор ліній електропередач (рис. 2.5, 2.6).
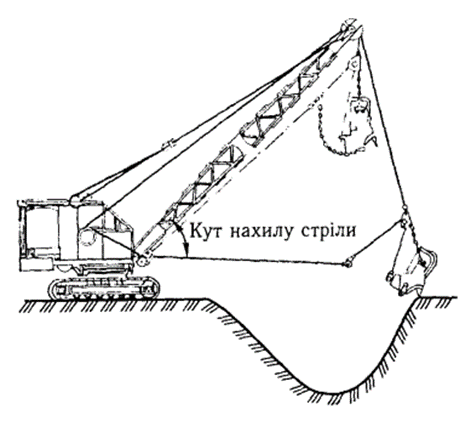
Рис. 2.5 – Схема роботи екскаватора-драглайна

Рис. 2.6 – Схема роботи грейдера: 1 – ківш; 2 – гідроциліндр ковша; 3 – рукоять; 4 – гідроциліндр рукояті; 5 – стріла; 6 – гідроциліндр стріли
Шрифти
Розмір шрифта
Колір тексту
Колір тла
Кернінг шрифтів
Видимість картинок
Інтервал між літерами
Висота рядка
Виділити посилання
Вирівнювання тексту
Ширина абзацу