Тема 6. Розрахунок конструкцій на динамічні впливи
1. Загальна характеристика розрахунків на динамічні впливи.
У ПК ЛІРА-САПР реалізовані можливості розрахунку на наступні динамічні впливи:
• сейсмічні;
• сейсмічні по заданих акселерограмах;
• пульсації вітру;
• імпульсні;
• удар;
• гармонічні;
•проведення модального аналізу.
Для розрахунку на динамічні дії необхідно підготувати дані про варіанти динамічних завантажень і задати для кожного з цих завантажень набір характеристик відповідної дії, що породжує коливання системи.
Динамічні завантаження повинні враховувати інерційні сили. Ці сили пов’язані з вузловими зосередженими масами і масами, розташованими на елементах системи. Напрям вузлових мас повинен відповідати поступальним динамічним ступеням свободи, відповідним граничним умовам, та ознаці схеми.
Завантаження сейсмічним і вітровим пульсаційним впливами описуються за допомогою задання лише ваги маси. Для завантажень ударним, імпульсним і гармонічним впливами крім ваги маси необхідно задати ще й характеристики та напрямки цих впливів у вузлах, де вони прикладені.
Завантаження для розрахунку на динаміку мають бути задані в строгому порядку:
1. Перше завантаження – це статичне навантаження на конструкцію (наприклад, власна вага конструкції або власна вага з технологічним навантаженням і т.д.) Задання першого завантаження нічим не відрізняється від завдання звичайних статичних завантажень. Це завантаження не є обов’язковим (може бути відсутнім).
2. Друге завантаження – це ваги мас. Дозволяються такі способи задання ваги маси:
а) Задання розподіленої ваги маси на елементи. При розрахунку здійснюється автоматичний збір ваги маси у вузли розрахункової схеми на основі даних про їх густину.
б) Задання ваги маси у вузли як сил, що діють у заданому напрямку. У цьому випадку користувач самостійно призначає вузли схеми, до яких будуть прикладені ці сили, обчислює їх самостійно і задає напрямок їхньої дії.
в) Формування ваги маси зі статичного завантаження. При цьому, як і у випадку 1, здійснюється автоматизований збір ваги у вузли. Проте вага мас буде зібрана лише з тих навантажень статачного завантаження, що діють уздовж осі Z.
Дозволяється застосування всіх способів в одному і тому ж завантажені.
1. Третє завантаження – це діюче динамічне навантаження на конструкцію. Реалізовано 4 типи динамічних навантажень:
а) кусочно-лінійне навантаження (ламана) з довільним кроком (рис. 7.1, а).
Задається кількість пар точок і пари точок «час – значення»;
б) синусоїдальне навантаження (рис. 7.1, б). Задається у виді A sin(ωt + φ), де A – амплітуда, ω – частота, φ – зсув фаз, також задається час початку і закінчення дії навантаження;
в) акселерограмма у відносних одиницях (рис. 7.1, в). Задається кількість точок в акселерограмі, час початку, крок дискретизації, масштабуючий коефіцієнт до акселерограми і значення акселерограми. Під масштабуючим коефіцієнтом слід розуміти добуток наступних коефіцієнтів:
- коефіцієнта переведення значень акселерограми в м/с2;
- коефіцієнта приведення до необхідної бальности майданчика будівництва.
Наприклад, початкова акселерограмма задана в долях g (прискорення вільного падіння) для 9-ти бального землетрусу (максимальна амплітуда 0,4), а необхідно її прикласти для 7-ми бального майданчика будівництва, то масштабуючий коефіцієнт має бути призначений k = 9,81∙0,1/0,4 = 2,54, де 0,1 – максимальна амплітуда для 7-ми бального землетрусу;
г) кусочно-лінійне навантаження з рівномірним кроком (рис. 7.1, г). Задається кількість точок, час початку, крок дискретизації; масштабуючий коефіцієнт і значення ламаної.
1. Четверте завантаження – це демпфуючі характеристики конструкції (завантаження не є обов’язковим і може бути відсутнім). Задання четвертого завантаження нічим не відрізняється від задання статичного завантаження. У ньому можуть бути присутніми як зосереджені, так і розподілені навантаження, що відбивають демпфуючі властивості конструкції. З четвертого завантаження формується діагональна матриця вузлових демпферів тільки по лінійних ступенях вільності. Напрям демпфуючого навантаження не має значення, оскільки його величина береться по абсолютному значенню. Сили демпфування приймаються прямо пропорційними швидкостям.
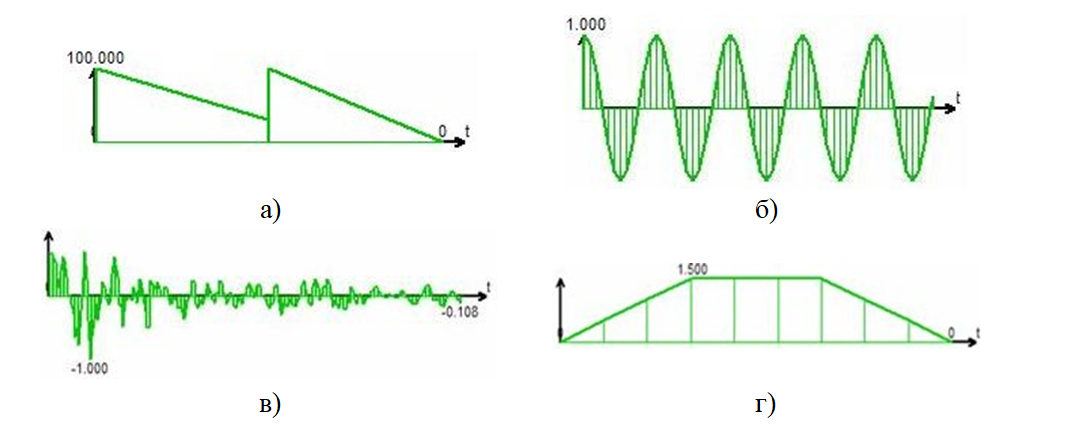
Рисунок 7.1 – Типи динамічних завантажень
Шрифти
Розмір шрифта
Колір тексту
Колір тла
Кернінг шрифтів
Видимість картинок
Інтервал між літерами
Висота рядка
Виділити посилання
Вирівнювання тексту
Ширина абзацу