Тема 2. Метод скінченних елементів. Математичні основи методу скінченних елементів
6. Матриця перетворень (направляючих косинусів)
озглянемо тепер СЕ у складі рами, розташований під кутом α до осі X в глобальній системі осей координат. Необхідно перейти від матриці реакцій [r]j в локальній системі координат до матриці [r]j у глобальній системі координат.
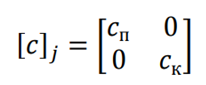
Задачу вирішуємо таким чином. На початку побудуємо матрицю [c]j, яка перетворить переміщення СЕ {Z}j в глобальній системі координат в переміщення {V}j:
{V}j= [c]j. {Z}j (3.6)
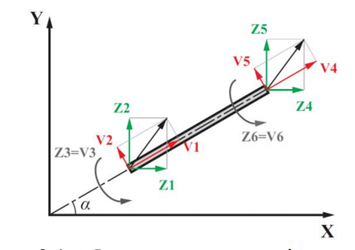
Рисунок 3.1 - Формування матриці перетворень
З рисунку 3.1 запишемо рівняння:
V1 = Z1*cosα+Z2*sinα
V2 = -Z1*sinα+Z2*cosα
V3 = Z3
V4 = Z4*cosα+Z5*sinα
V5 = -Z4*sinα+Z5*cosα
V6= Z6
У матричній формі приведений вище запис матиме вигляд:
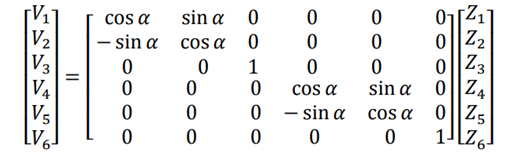 (3.7)
(3.7)
чи у блочній формі
Оскільки ми розглядаємо плоскі пружні системи, то вектори вузлових зусиль і вузлових переміщень, як для окремого елементу, так і для споруди в цілому, пов’язані між собою лінійно:
- в локальній системі координат
{S}j'=[r]j' * {V}j (3.8)
- в глобальній системі координат (основне рівняння МСЕ)
{S}j=[r]j * {Z}j (3.9)
Крім того,
{V}j=[c]j * {Z}j (3.10)
Аналогічно
{S}'j=[c]j.{S}j (3.11)
де {S}'j,{S}j - вузлові зусилля СЕ відповідно в локальній і глобальній системах координат.
Тоді
{S}j = [c]j-1 *{S}j' = [c]j-1 * [r]j' {V}j=[c]j-1* [r]j' * [c]j {Z}j
Для матриці направляючих косинусів виконується рівність [c]j-1= [c]jT. Тоді
{S}j=[c]jT * [r]j' * [c]j * {Z}j
Позначимо
[r]j =[c]jT [r]j' * c]j (3.12)
Вираз (3.12) і є формулою для обчислення матриці жорсткості СЕ в глобальній системі координат.
При формуванні матриць жорсткості окремих елементів [r]j, мають бути зафіксовані початок і кінець кожного стержня, оскільки від цього залежить знак кута а, що визначає орієнтацію стержня в глобальній системі координат XOY.
Шрифти
Розмір шрифта
Колір тексту
Колір тла
Кернінг шрифтів
Видимість картинок
Інтервал між літерами
Висота рядка
Виділити посилання
Вирівнювання тексту
Ширина абзацу