ЛЕКЦІЯ 9. ЕЛЕМЕНТИ ОРІЄНТУВАННЯ ЗНІМКІВ
2. Визначення елементів зовнішнього орієнтування знімків
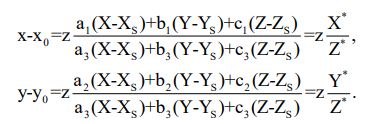
Для вирішення ряду фотограмметричних завдань необхідно знати елементи орієнтування знімка. Його елементи зовнішнього орієнтування можуть бути одержані або за допомогою спеціальних приладів в процесі аерофотознімання, або в камеральних умовах за геодезичними і фотокоординатними опорними точками. Другий варіант називається зворотною просторовою фотограмметричною засічкою. Математичною основою її розв’язання є прямі чи зворотні рівняння колінеарності. Розглянемо один з можливих способів математичного вирішення засічки, що грунтується на застосуванні рівнянь:
Нехай на знімку зображено точки місцевості, геодезичні координати яких відомі (такі точки називаються опорними), і координати x, y цих точок визначені за даними вимірювань знімка.
Задачу вирішують таким чином:
1.Визначають наближені значення елементів зовнішнього орієнтування знімка. Наприклад, кутові величини приймають рівними нулю, а координати центру проекції визначають за даними бортових вимірювань або яким-небудь іншим способом.
2.Виконують вимірювання з метою визначення координат x та y опорних точок на знімках.
3. Наближені значення елементів зовнішнього орієнтування, а також елементи внутрішнього орієнтування і задані координати опорних точок підставляють в рівняння (4.41) і обчислюють координати x' і y' зображень опорних точок на знімку. Через похибки вимірювань, неточності наближених величин, прийнятих як невідомі, та інші причини обчислені координати не будуть рівні виміряним.
4. Складають рівняння поправок, приймаючи різницю між виміряними і обчисленими координатами точок на знімку в якості їх вільних членів.
Зазначені рівняння матимуть вигляд:
5. При надлишковій кількості знаків систему лінійних рівнянь розв’язують за умови:
![]()
де Р - матриця виміряних координат точок знімка. Тобто складають і
розв'язують рівняння. Для системи (4.55) вони мають вигляд:
![]()
де В - матриця коефіцієнтів a, b, ..., g ' для опорних точок знімка;
δ - вектор поправок;
l - вектор вільних членів рівнянь
6. Уводять поправки δ до наближених значень елементів зовнішнього орієнтування, одержують уточнені значення невідомих. Такий шлях вирішення називають методом ітерацій.
7. Оцінюють точність рішення задачі. Для цього в останньому наближенні обчислюють вагові коефіцієнти Q і поправки V.
Шрифти
Розмір шрифта
Колір тексту
Колір тла
Кернінг шрифтів
Видимість картинок
Інтервал між літерами
Висота рядка
Виділити посилання
Вирівнювання тексту
Ширина абзацу