Тема 5. Принципи побудови скінченно-елементних моделей. Характеристики жорсткості елементів розрахункової схеми.
1. Системи координат
Сучасні програмні комплекси надають користувачеві можливість використання набору різних систем координат. Можна виділити три основні види систем координат (рис. 6.1):
- Глобальна (X, Y, Z) – відносно якої може описуватися весь набір чинників, що характеризують комп’ютерну модель: вузлові переміщення, в’язі місцеві і вузлові навантаження, напруження і т. д. Глобальна система координат може бути декартовою, циліндричною, сферичною і ін.
- Місцева система координат (X1, Y1, Z1) є прерогативою скінченних елементів. Відносно неї може задаватися навантаження, що діє по області скінченного елементу, обчислюється напруження, ведеться розрахунок армування.
- Локальна система координат (X2, Y2, Z2) є прерогативою вузлів. Відносно неї можуть задаватися напрями переміщень, вузлові навантаження, в’язі.
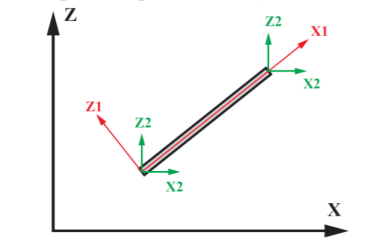
Рисунок 6.1 – Системи координат стержневого СЕ
Шрифти
Розмір шрифта
Колір тексту
Колір тла
Кернінг шрифтів
Видимість картинок
Інтервал між літерами
Висота рядка
Виділити посилання
Вирівнювання тексту
Ширина абзацу